

Foot-type three-dimensional reconstruction and measurement method based on Kinect and binocular vision
A binocular vision and 3D reconstruction technology, applied in the field of 3D reconstruction, can solve the problems of low measurement accuracy, low reconstruction accuracy, and difficulty in obtaining point clouds, etc., and achieve the effect of low hardware cost, improved accuracy and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to have a deeper understanding of the method of the present invention, first of all, we will specifically describe the relevant principles and algorithms of the present invention in conjunction with the accompanying drawings.
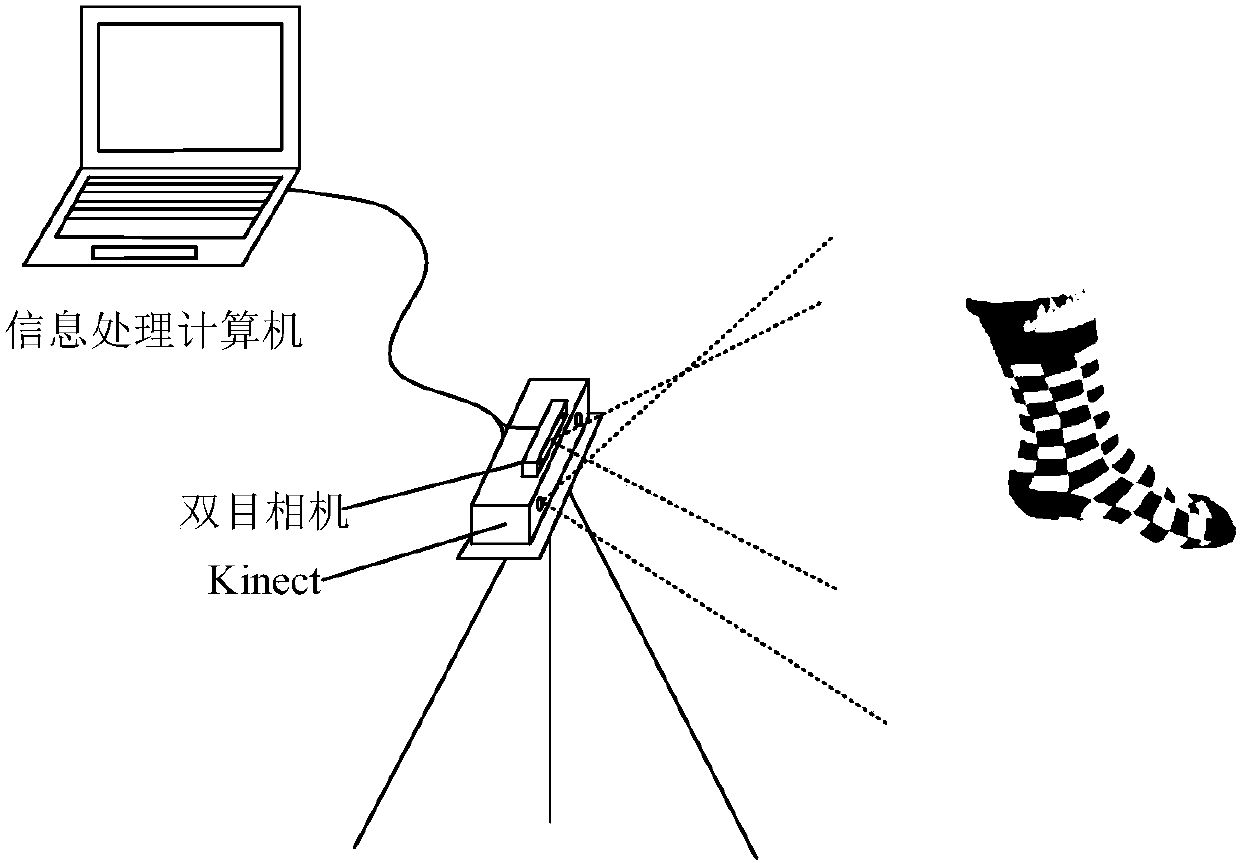
[0023] Such as figure 1 Shown is the device figure that the inventive method is used, and the structure design of Kinect sensor and binocular camera system is up and down structure, it is fixed together, can be regarded as rigid structure, then Kinect and binocular camera are calibrated, it can be known that Kinect The coordinate center of and the coordinate center of the binocular system have the following conversion relationship:
[0024]
[0025] In the above formula, (X k ,Y k ,Z k ) is the center of the coordinate system of Kinect, (x b ,y b ,z b ) is the center of the coordinate system of the binocular camera system, R kb ,T kb Rotation and translation matrices for coordinate transformations.
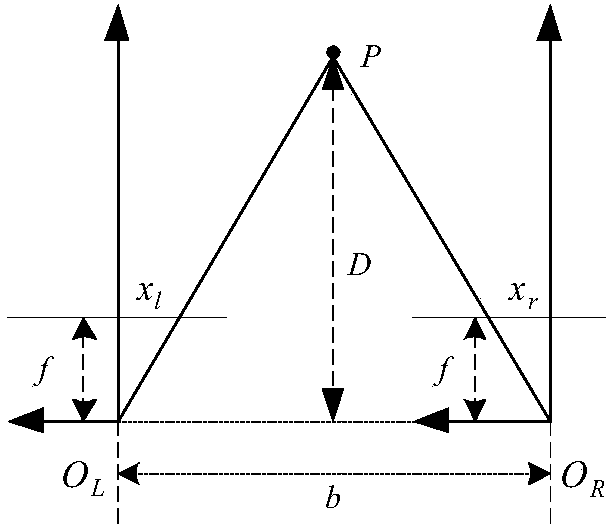
[0026] Such as figure 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More