

Tracking control method for compensating human-computer interaction force for rehabilitation walking training robot
A walking training and tracking control technology, which is applied in the general control system, adaptive control, control/regulation system, etc., can solve the problem of difficulty in designing tracking controllers for rehabilitation walking training robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention is achieved through the following technical solutions:
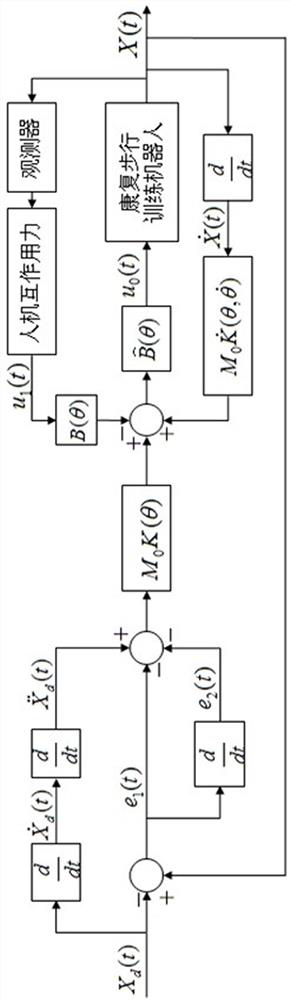
[0059] 1) Aiming at the generalized control input force in the dynamic model of rehabilitation walking training robot, it is decomposed into tracking control force and human-computer interaction force, and a robot system dynamic model with human-computer interaction force is obtained;
[0060] 2) Taking the human-computer interaction force as the extended state of the system, using the real-time position output of the robot, designing a system observer combining constant gain and time-varying gain to estimate the human-computer interaction force;
[0061] 3) Design the Lyapunov function based on the state observation error, trajectory tracking error and velocity tracking error to make the observation error system and tracking error system asymptotically stable; at the same time, obtain the solution method of the observer gain and human-computer interaction force, and according to the obtained ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More