

Visual positioning system according to semantic meaning in dynamic environment and method thereof
A technology of dynamic environment and positioning system, applied in the field of visual positioning system, can solve the problems of increasing error, not considering the dynamic characteristics of the object itself, unable to correctly determine the dynamic characteristics of the object, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
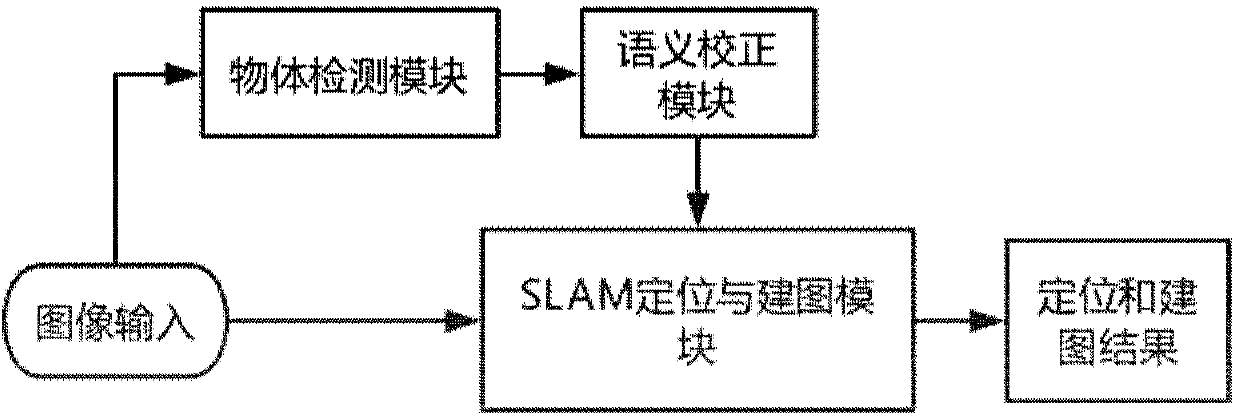
[0035] The first embodiment of the present invention provides a monocular vision positioning system in a dynamic environment, such as figure 2 Shown is a schematic structural diagram of a monocular vision positioning system in a dynamic environment according to an embodiment of the present invention, including an object detection module, a semantic correction module, and a SLAM positioning and mapping module, wherein the object detection module is used to detect the type of object in an input image and its location, and output the detection result; the semantic correction module is used to receive the detection result output by the object detection module, and judge the object as a dynamic object or a static object accord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More