Upper limb rehabilitation robot
A rehabilitation robot and upper limb technology, which is applied in the field of rehabilitation training robots and robots, can solve the problems of not considering the scapula, not being able to fully realize rehabilitation, and not being flexible enough, so as to achieve the effect of simple design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0085] The invention will be further described below in conjunction with the accompanying drawings, but it is not used to limit the scope of the present invention.
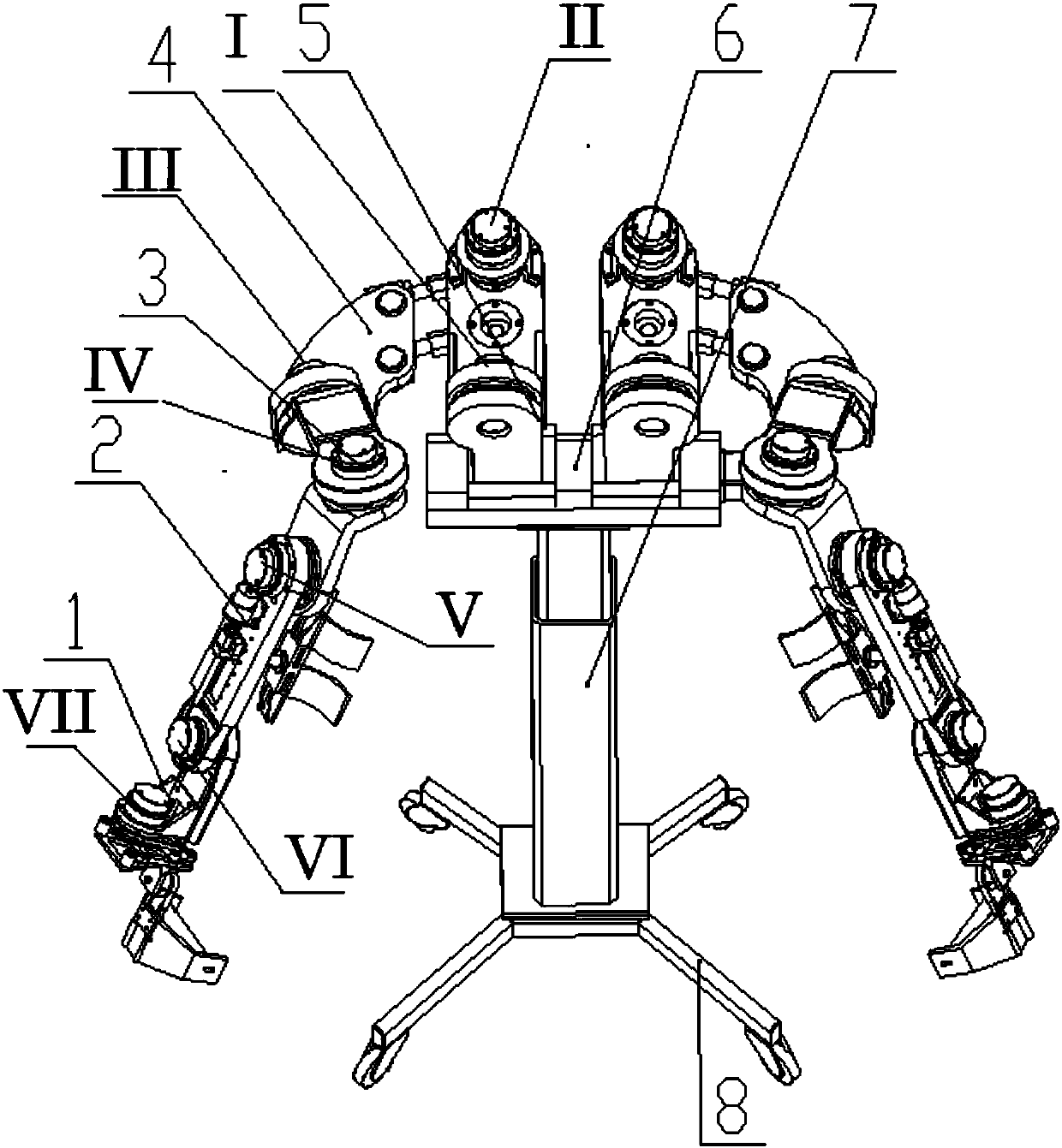
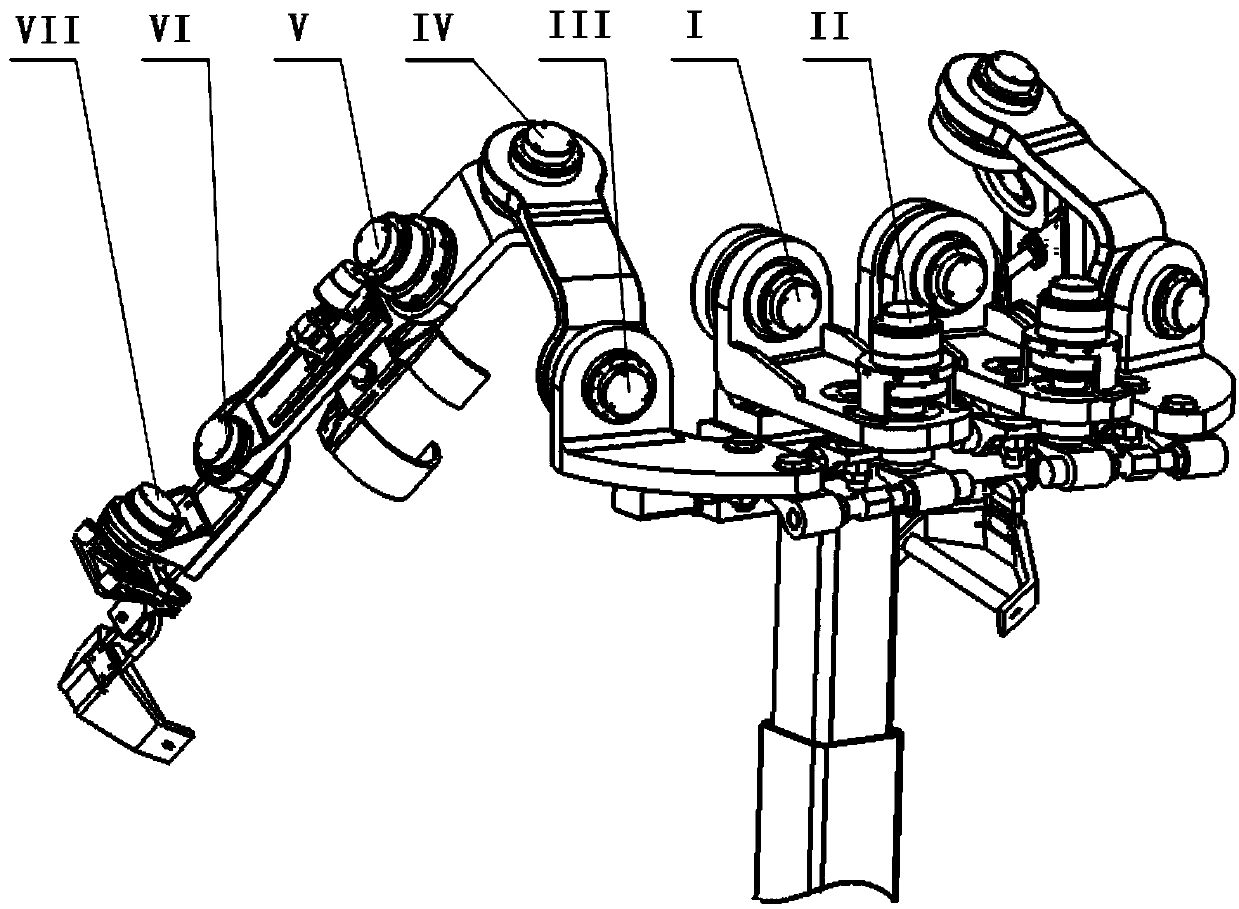
[0086] Such as Figure 1-11 As shown, the present invention provides a kind of upper limb rehabilitation robot, comprising:
[0087] Base (8), elevating platform (7), two-way slide table (6) and first arm (specifically refer to right arm in the present embodiment); Described first arm (right arm) comprises support (5), Scapula module (4), shoulder module (3), upper arm module (2) and forearm module (1);
[0088] Also includes: first joint module (I), second joint module (II), third joint module (III), fourth joint module (IV), fifth joint module (V), sixth joint module (VI) , the seventh joint module (VII);
[0089] The shoulder module (4) is connected with the support (5) through the first joint module (I); the shoulder module (4) is connected with the shoulder module (3) through the third joint module (III); ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com