

A method for automatic recovery of unmanned train positioning
A technology for train positioning and automatic recovery, applied in the field of rail transit, can solve the problems of long rescue time and large impact on system operation, and achieve the effects of short recovery time, small impact, and short parking time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The existing positioning technology is basically based on a wayside beacon + a vehicle-mounted beacon reading unit, and the train position is known through the position of the beacon. However, the position of the train will be lost due to errors in beacon reading, missing reading, and missing turnout tables.
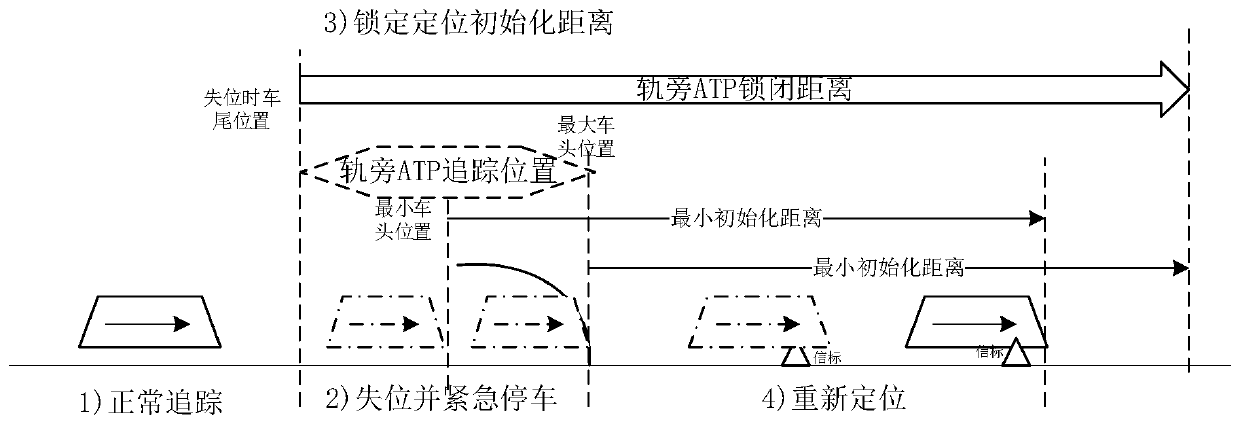
[0023] The invention is based on the characteristics of trackside ATP continuous tracking of trains, after the train position is lost, the unmanned train positioning and automatic recovery are quickly completed, the interval stopping time is reduced, and the impact on passengers is reduced.
[0024] Such as figure 1 As shown, an automatic recovery method for unmanned train positioning based on trackside ATP monitoring. During the driving of the unmanned train, the on-board ATP continuously locates through the positioning equipment and continuously reports the position to the trackside ATP. When the positioning equipment fails, When the on-board ATP is out of position,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More