

Driverless train positioning failure rescue method
A technology of unmanned driving and trains, applied in the field of rail transit, can solve problems such as long rescue time and large impact on system operation, and achieve the effects of short recovery time, small impact and short parking time
Active Publication Date: 2018-04-06
浙江众合科技股份有限公司
View PDF4 Cites 14 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
When a fault causes the train to lose its position and the positioning equipment fails to relocate, the only way is to use the rescue train or send the driver to board the train from the section. The rescue time is long and has a great impact on the operation of the system.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 2
[0055] Embodiment 2 is different from Embodiment 1 in that the real-time mobile authorization sending method is as follows:
[0056] It adopts the method of sending an authorization to the on-board ATP, waiting for the trackside equipment to detect whether the train has stopped at the designated position, and continuing to control if the conditions are not met.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
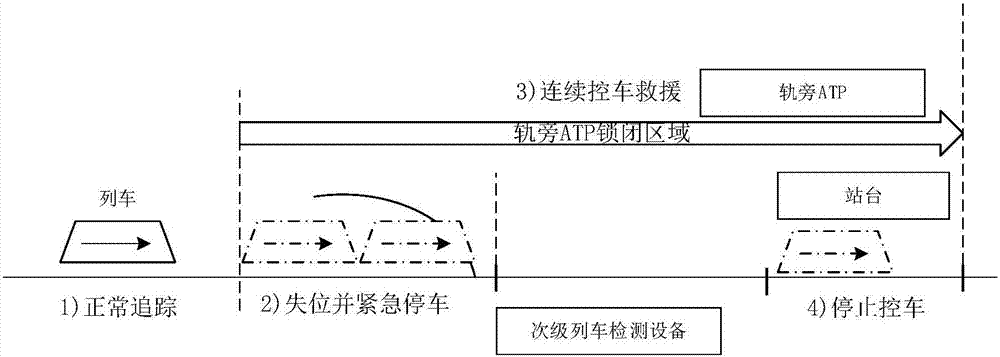
The invention discloses a driverless train positioning failure rescue method. When positioning equipment breaks down and a positioning failure happens to a train-mounted ATP, the following steps are executed that firstly, emergency braking parking is immediately performed by the train-mounted ATP, and the fault information of the positioning equipment is reported to a trackside ATP; secondly, after the trackside ATP acquires the fault information, reported by the train-mounted ATP, of the positioning equipment, a train is locked from a positioning failure position to the area of a station / evacuation platform, and after other trains all drive out of a locking area, real-time movement authority is sent to the train-mounted ATP, wherein the real-time movement authority includes command validtime and allowable running speed; thirdly, after the train-mounted ATP receives the real-time movement authority, the train is controlled to move according to the authority; fourthly, when the trackside ATP obtains the information that the train drives into the station / evacuation platform through a secondary train detection device, sending of the movement authority is stopped. By means of the method, the recovery process can be immediately started after positioning faults of the equipment occur, the time that the train is parked in an interval is short, and influences on passengers are small.
Description
technical field [0001] The invention relates to the technical field of rail transit, in particular to a control method for an unmanned train. Background technique [0002] The safety protection of the fully automatic unmanned driving system of urban rail transit is based on the on-board positioning system, and the secondary train detection can only be used to realize the route-level protection of the interlocking system. When the positioning equipment fails, the train will be driven manually. [0003] Unmanned driving is especially a fully automatic unattended unmanned driving system, and there is no driver on the train. When a fault causes the train to lose its position and the faulty positioning equipment cannot be relocated, the only way to rescue the train or send the driver to get on the train from the section is the only way. The rescue takes a long time and has a great impact on the operation of the system. Contents of the invention [0004] The technical problem t...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): B61L27/00
CPCB61L2027/204B61L27/20B61L27/40
Inventor 胡顺定
Owner 浙江众合科技股份有限公司