

Bag of visual words-based closed-loop detection method for mobile robot maps
A mobile robot, closed-loop detection technology, applied in the field of map creation, can solve the problems of calculation accuracy, large data scale, wrong closed-loop detection results, etc., and achieve the effect of fast calculation speed and algorithm calculation speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with accompanying drawing and embodiment
[0054] A method for detecting loop closures in a mobile robot map based on bag of visual words, comprising the following steps:
[0055] Step 1: Establishment of visual dictionary model;
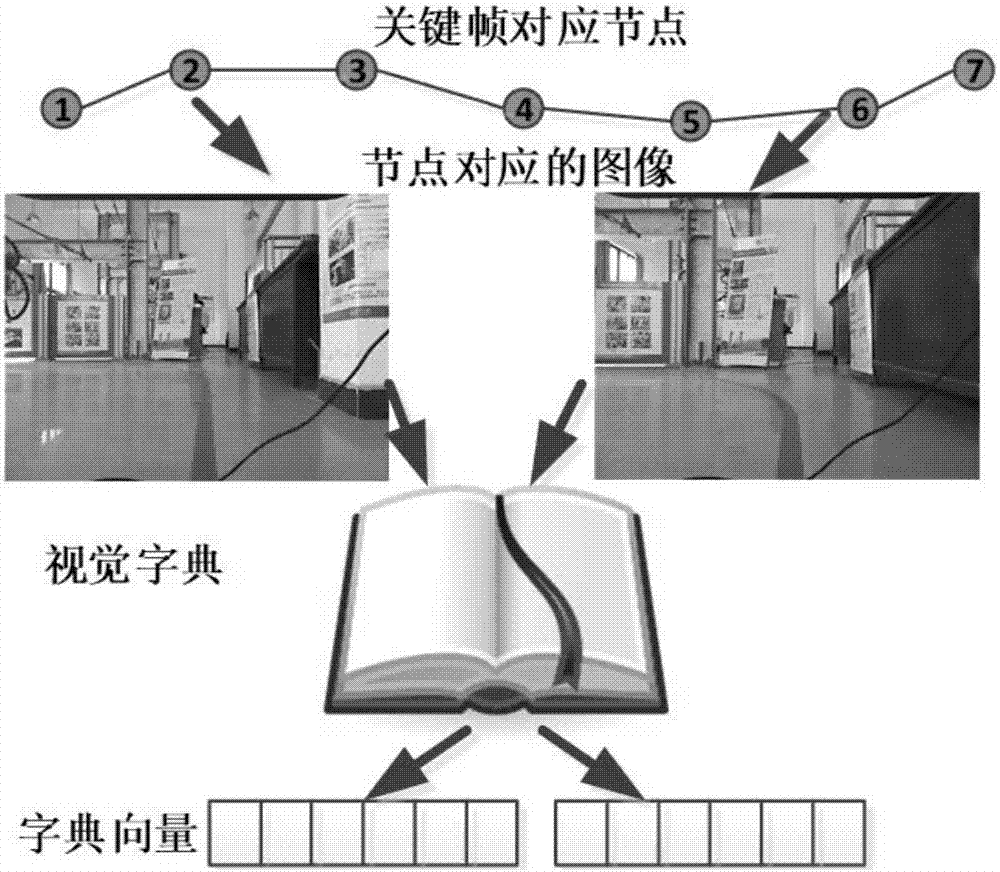
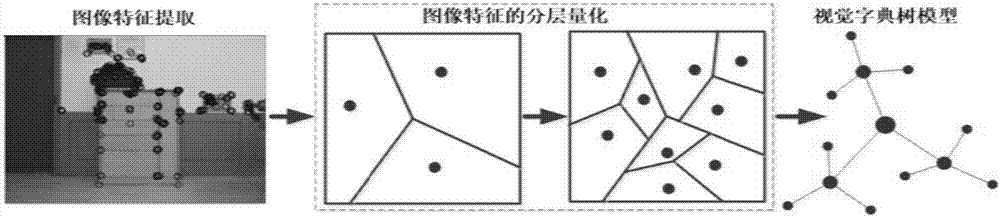
[0056] Such as figure 1 As shown, the ORB feature points are first extracted from multiple images in the scene by offline training, and then trained into a tree-like visual dictionary, and the closed loop will be detected in real time during SLAM operation, and after obtaining the images currently observed by the robot, The corresponding dictionary vector is obtained by querying the established visual dictionary, and the dictionary vector corresponds to the scene description at the location of the image.
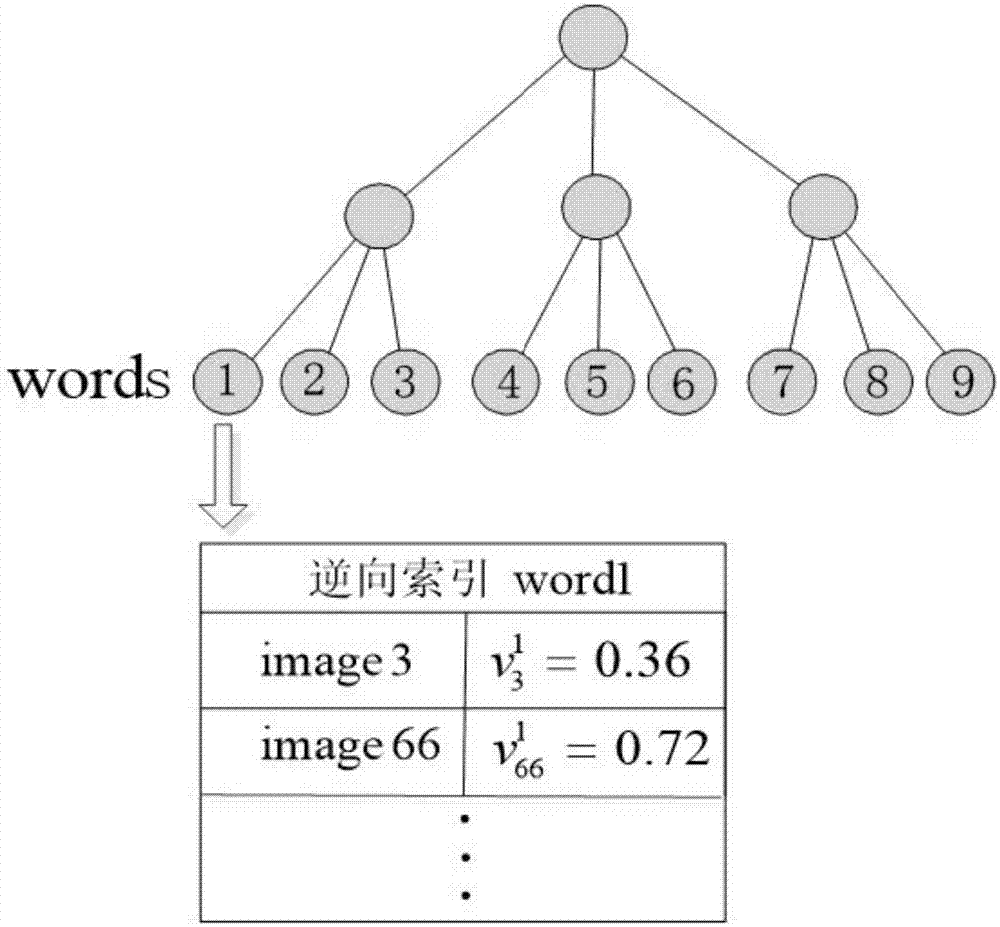
[0057] In the process of hierarchical quantification of image features, vocabulary generation is established on the basis of hierarchical K-Means clustering of features,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More