

A comprehensive evaluation method for operating schemes of mobile welding robots
A technology for welding robots and operation schemes, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of less research on robot system performance evaluation, and achieve improved continuous power supply time, strong comprehensiveness, and optimized The effect of energy distribution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
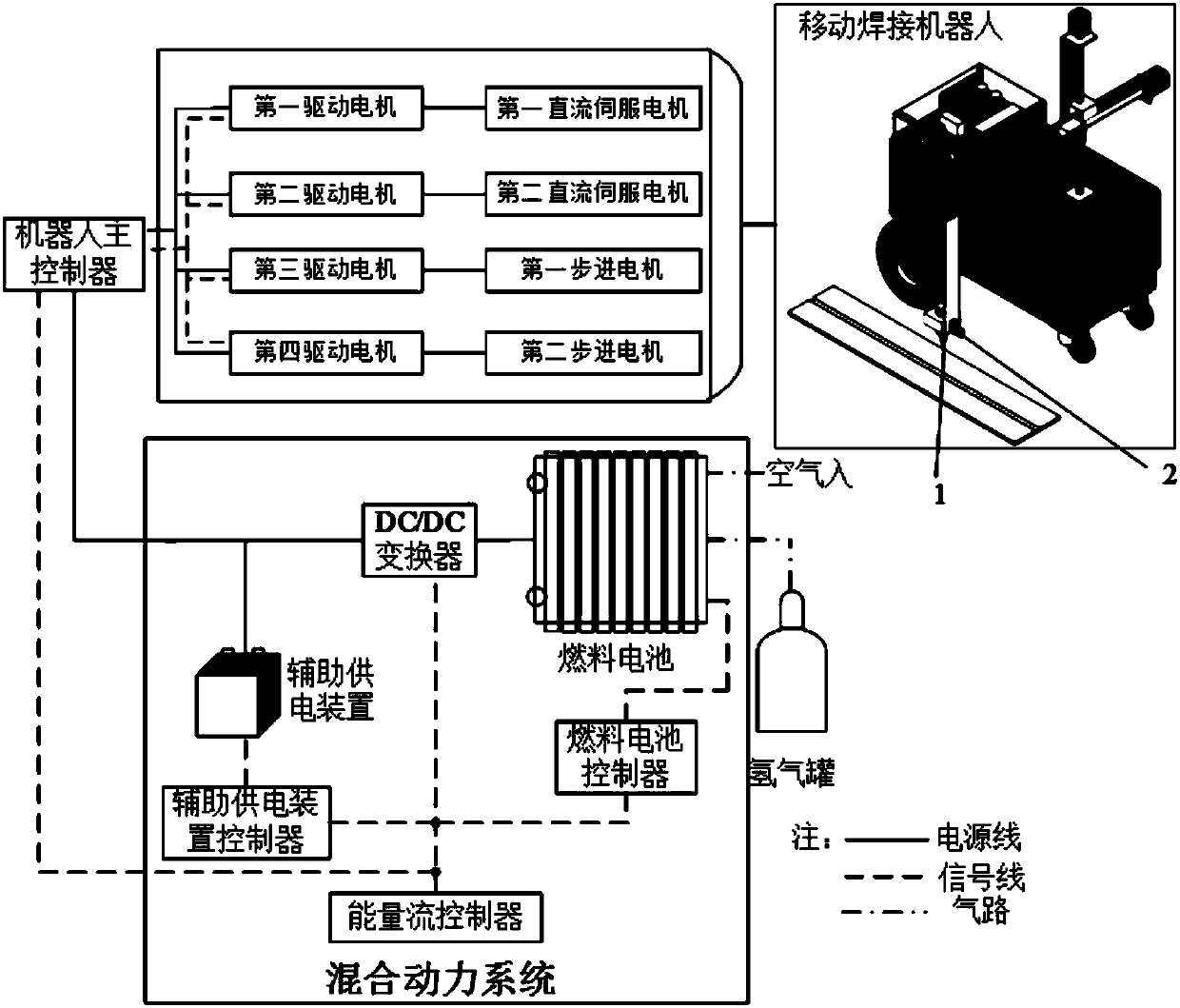
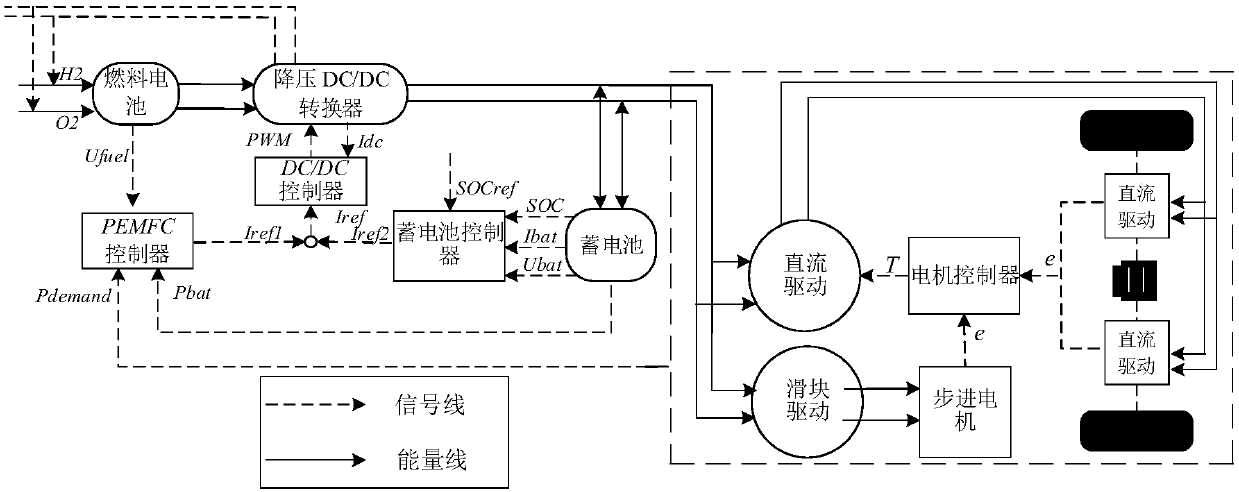
[0043] Such as figure 2 As shown, the welding robot system in this evaluation method includes a mobile welding robot body, a robot main controller and a fuel cell hybrid power system. The fuel cell hybrid power system is connected to the welding robot body through a drive controller. Among them, the hybrid power system includes a main power supply, an auxiliary power supply device and an energy management unit. The main power supply is a fuel cell, and the auxiliary power supply device is a battery. The output end of the fuel cell is connected to the drive controller through a Buck DC / DC converter, and the battery is connected in parallel to The output end of the Buck type DC / DC converter and the energy management unit are respectively connected to the mobile welding robot, the fuel cell, the storage battery and the Buck type DC / DC converter.
[0044] The welding robot controls the output current through a Buck DC / DC converter, and the energy management control process includ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More