

Quick human movement identification method oriented to human-computer interaction
A technology of human action recognition and human-computer interaction, applied in the input/output, character and pattern recognition, computer parts and other directions of user/computer interaction, can solve the problem of weak robustness, etc., to improve the speed of action recognition, Optimize the effect of quick control and convenient subsequent identification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
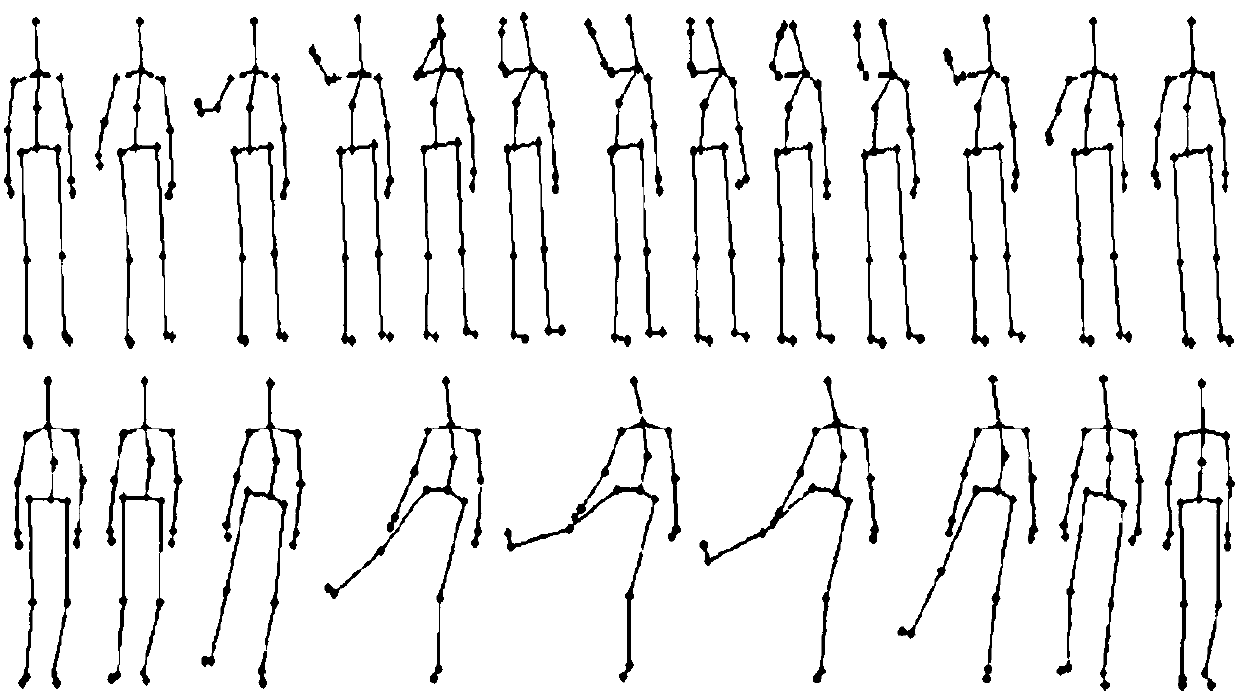
[0070] The present invention adopts Microsoft's 3D depth-of-field camera Kinect as an action acquisition device, and the camera has no requirement for ambient light, and complete darkness is also acceptable. When collecting actions, place the Kinect at a height of 1m from the ground, and the person to be collected stands facing the Kinect, keeping his body parallel to the camera plane, about 1-2m away from the camera, and there is no obstacle between the camera and the camera. According to the experimental requirements, 5 people in the laboratory were selected for action recording and testing, and the following three action template libraries were established:
[0071] (1) Customize 20 actions, select one of them, record these 20 actions once, and save the action template.
[0072] (2) Customize 20 kinds of actions, choose 5 people, each person will record 20 kinds of actions 10 times, and save the average value of 50 templates as a template.
[0073] (3) Use the second templ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More