

System and method for determining a work offset
A technology of working and working planes, applied in general control systems, control/regulation systems, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
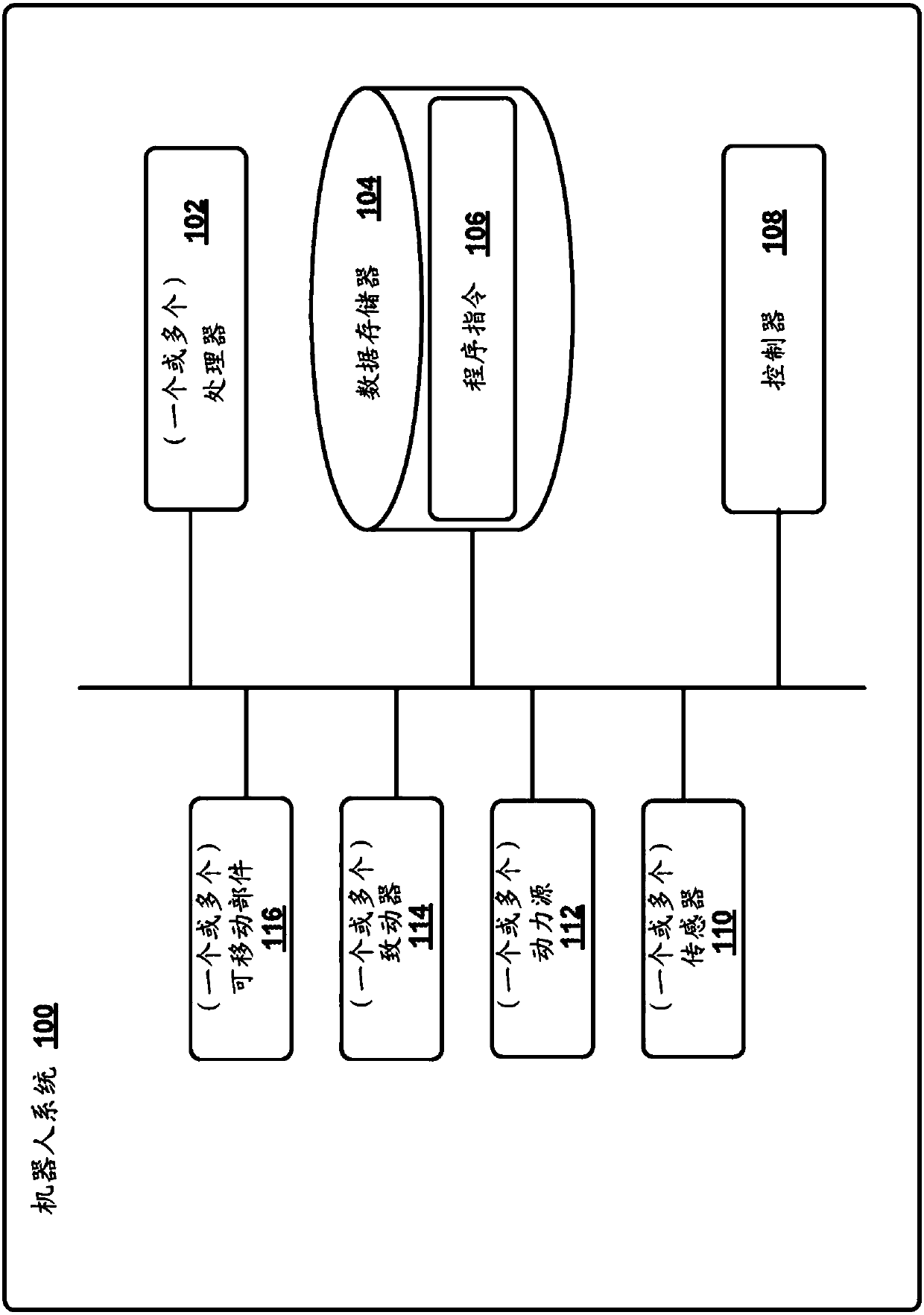
[0018] Example methods and systems are described herein. Any example embodiment or feature described herein is not necessarily to be construed as preferred or advantageous over other embodiments or features. The example embodiments described here are not meant to be limiting. It will be readily appreciated that certain aspects of the disclosed systems and methods can be arranged and combined in a wide variety of different configurations, all of which are contemplated herein.
[0019] Furthermore, the particular arrangements shown in the drawings are not to be considered limiting. It should be understood that other embodiments may include more or less of each element shown in a given figure. Furthermore, some of the elements shown may be combined or omitted. Additionally, example embodiments may include elements not shown in the figures.
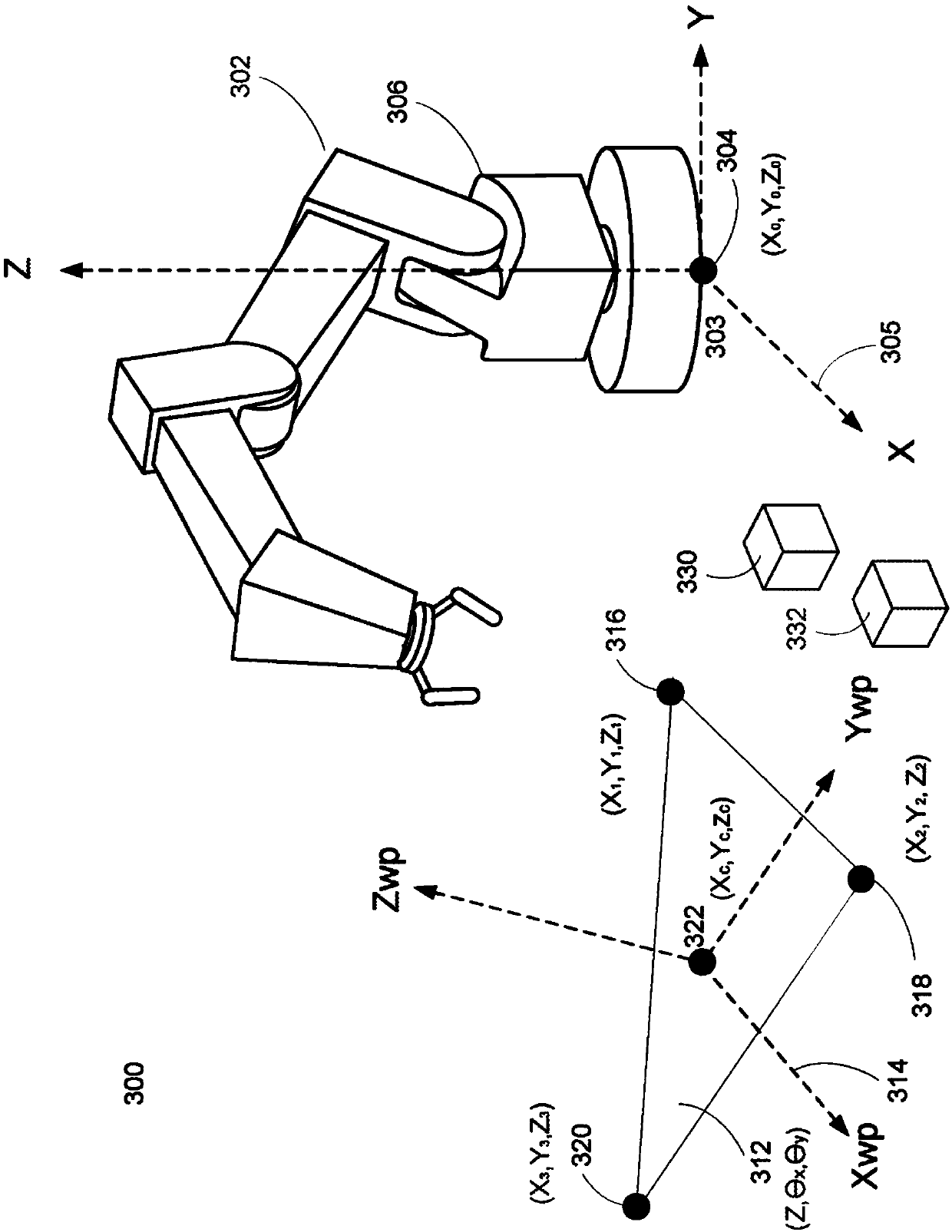
[0020] The robot can learn information about the position and orientation of the aircraft in the environment (eg, ground level) in order...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More