

Omnidirectional chassis control method based on fuzzy immune neural network algorithm
A neural network algorithm, fuzzy neural network technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as poor control accuracy, and achieve the effect of improving tracking ability and high control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
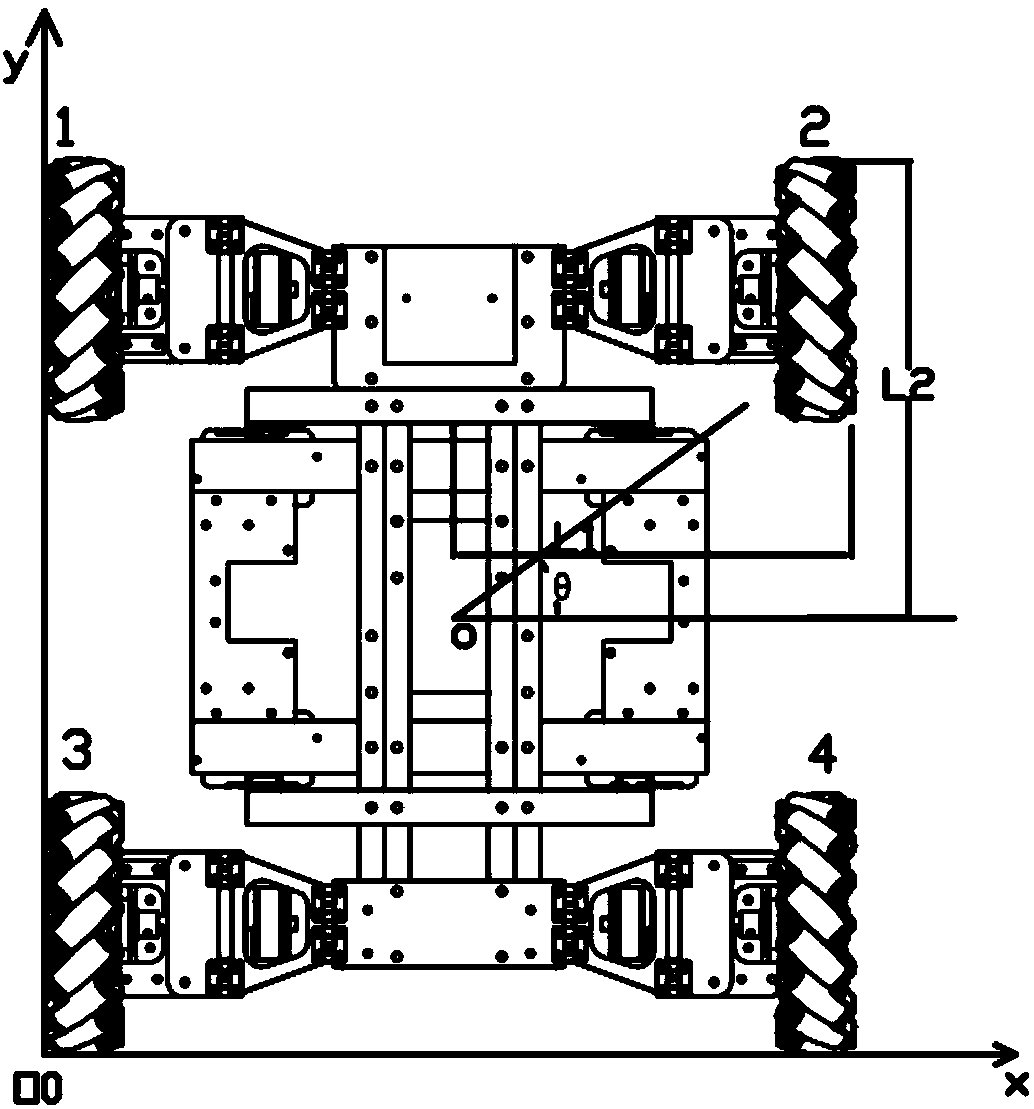
[0047] refer to Figure 1-9 . The specific steps of the omnidirectional chassis control method based on the fuzzy immune neural network algorithm of the present invention are as follows:
[0048] Step 1. Construct a fuzzy neural network controller for chassis control.
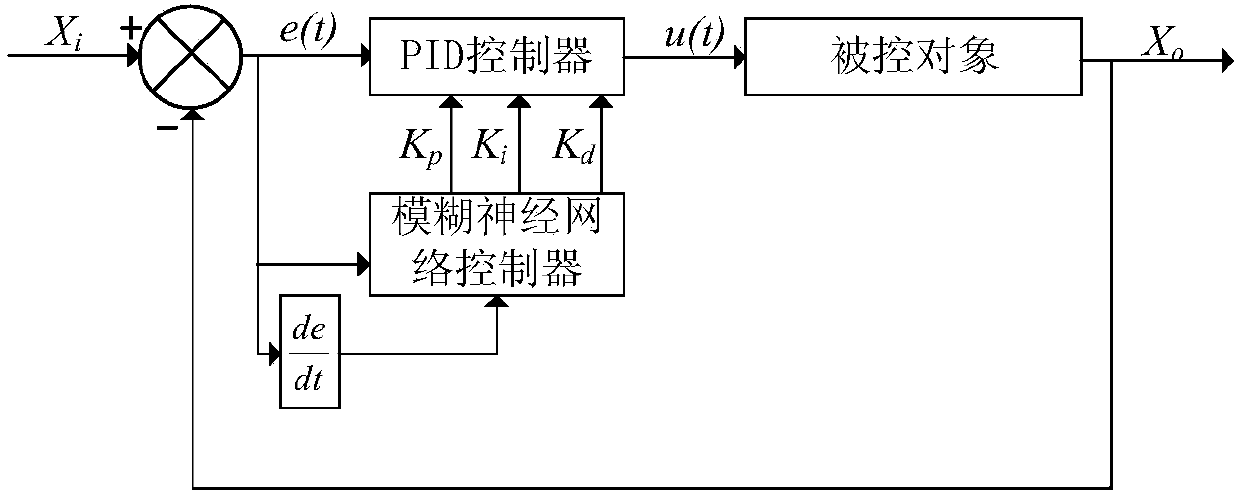
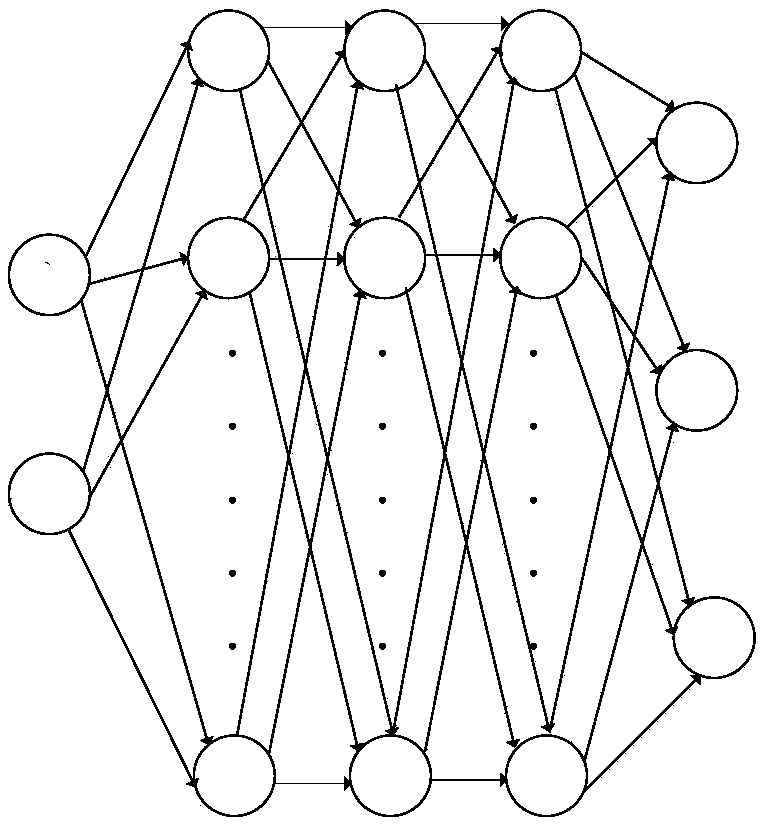
[0049] Initialize the neural network, the first layer of the network is the input layer, and the output error e(t) of the system and the variation of the error Δe(t) are sent to the system, The connection weight of all nodes in this layer is 1; the second layer is the fuzzy layer, and the input is fuzzy processed by the membership function. The membership function is chosen as a Gaussian distribution model function, then
[0050]
[0051] where m ij is the center of the i-th fuzzy variable k-th Gaussian function, σ ij is the width of the Gaussian function. The connection weight of all nodes in this layer is 1; the third and fourth layers are fuzzy calculation layers, which complete fuzzy calculations....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More