

SCARA high-speed parallel connection mechanical arm having partial decoupling and dynamic balance characteristics
A manipulator and partial solution technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as highly nonlinear coupling of motion, large number of branch chains, complex structure and control, etc., to simplify control, reduce manufacturing costs, Improve the effect of dynamic response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] A SCARA high-speed parallel manipulator with partial decoupling and dynamic balance characteristics of the present invention is described in detail in conjunction with the accompanying drawings and embodiments as follows:
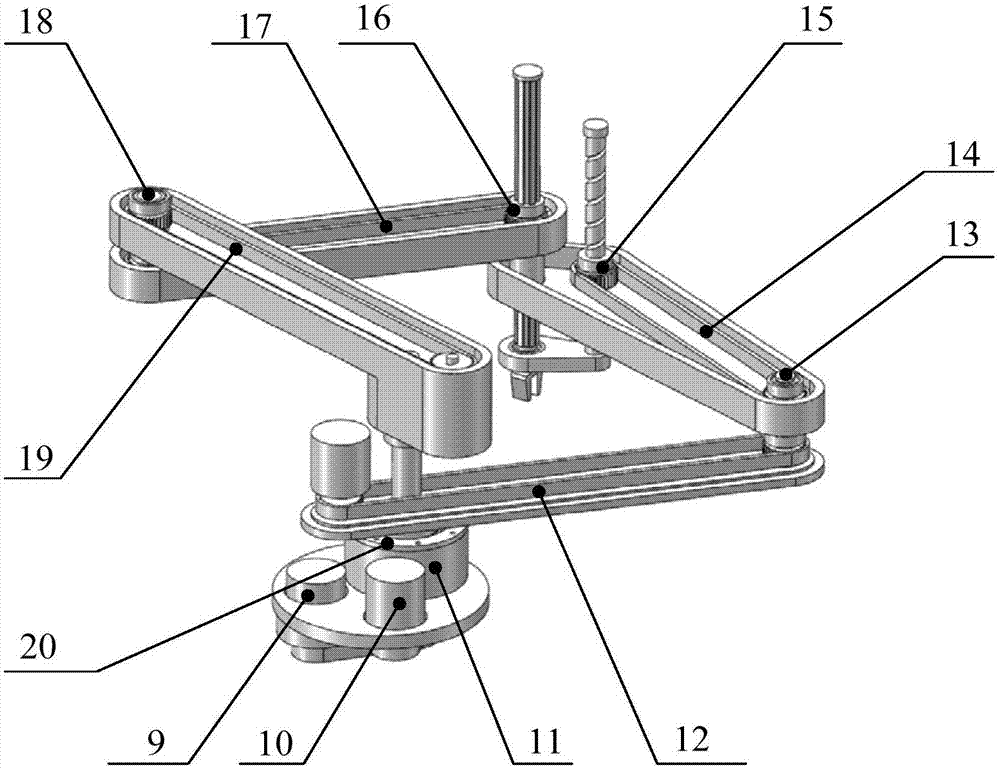
[0020] A SCARA high-speed parallel manipulator with partial decoupling and dynamic balance characteristics, the main body is a kinematic branch chain;
[0021] There are two kinematic branch chains, which are the first kinematic branch chain and the second kinematic branch chain;
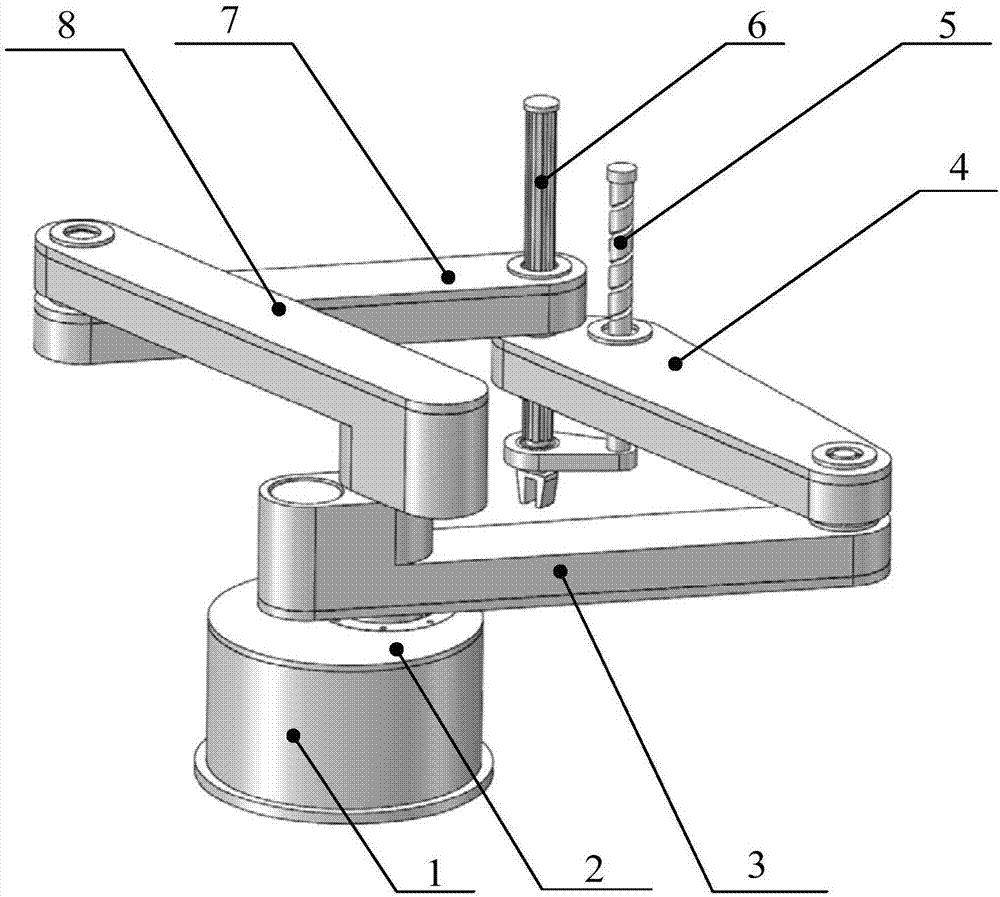
[0022] The first kinematic branch chain includes a first active link 3, a first passive link 4, a proximal drive device, an elbow connection device and an end effector;
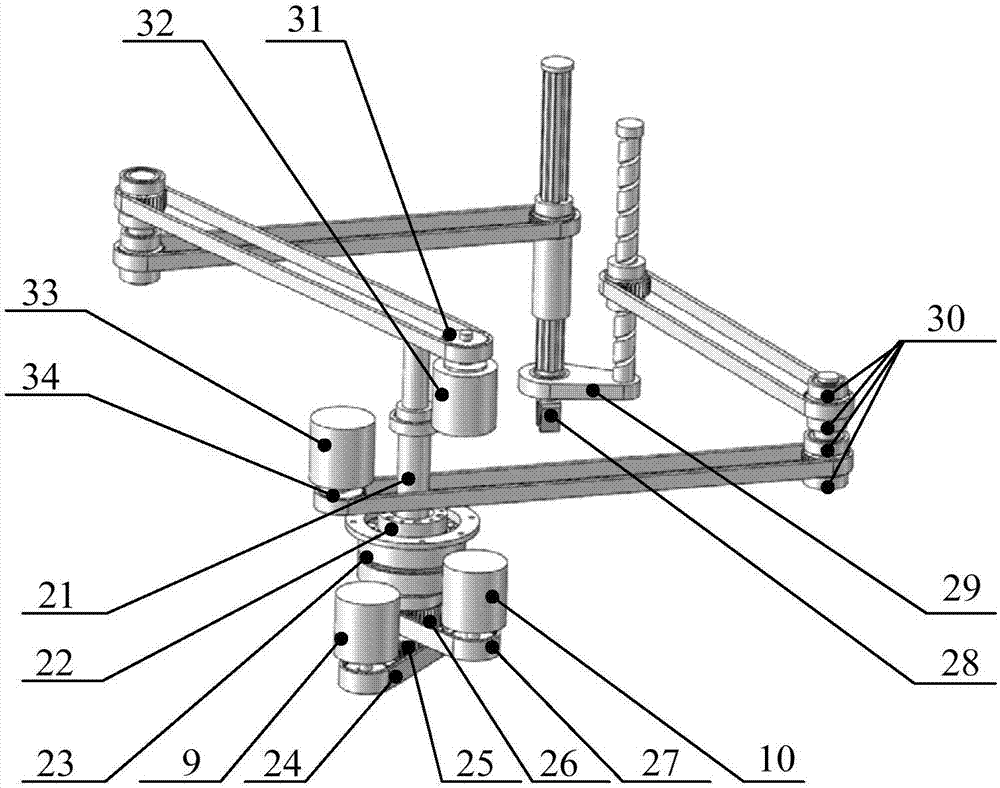
[0023] The proximal driving device is located inside the fixed base 1, sealed by the base end cover 2, and includes the first branch chain motor 10, the first branch chain driving synchronous belt 27, the first branch chain main shaft pulley 26 and the first The branch chain main shaft 22, the first bran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More