Gesture instruction sensing device of surgical robot
A technology of surgical operation and sensing device, which is used in surgical robots, surgical manipulators, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
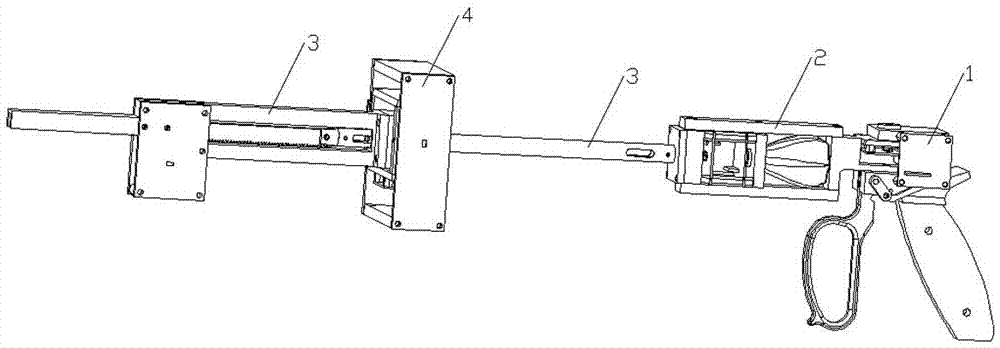
[0020] Specific embodiment 1: The object of the present invention is to: aim at the above-mentioned existing problems, provide a kind of multi-degree-of-freedom operation remote operation gun (attached for the convenience of expression figure 1 The right direction in the center is the X direction, the upward direction is the Y direction, and the direction perpendicular to the drawing is the Z direction), including:
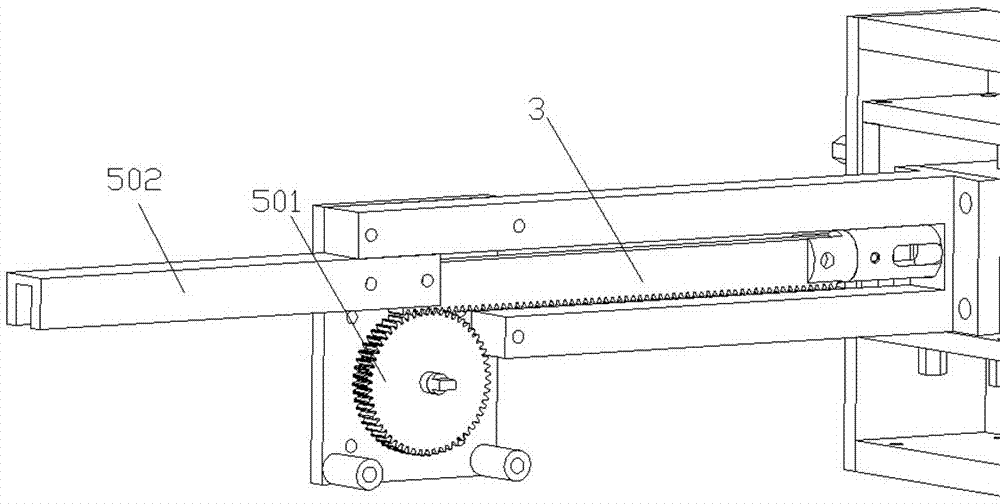
[0021] The sensor assembly, the sensor includes several Hall sensors, the Hall sensor detects the movement and rotation of the operating chamber, the Hall sensor detects each rotation or the movement of the moving part, and the Hall sensor Models, etc. are commonly used according to needs, and can meet the needs;
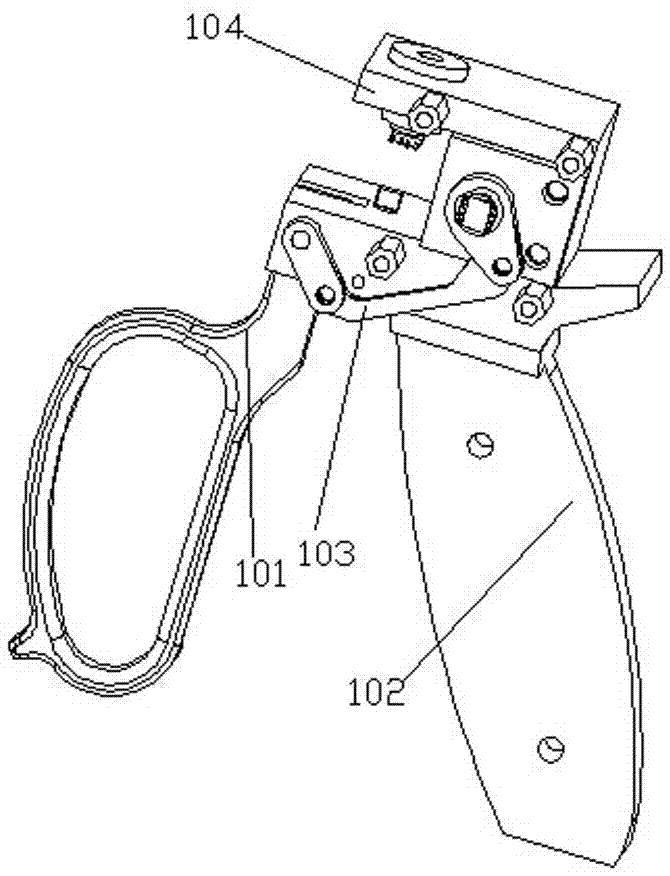
[0022] The gun handle, the gun handle includes a trigger and a handle, and the trigger rotates around the handle. In a preferred solution, the trigger and the gun handle adopt a structure similar to that of the gun handle in the clip applier or electroc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More