

Modular flexible artificial muscle joint
An artificial muscle and modular technology, applied in the field of flexible robots, can solve the problems of complex structure of flexible drive joints, large size, and difficulty in multi-joint combination, and achieve the effect of simple structure, light weight, and simple connection and disassembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
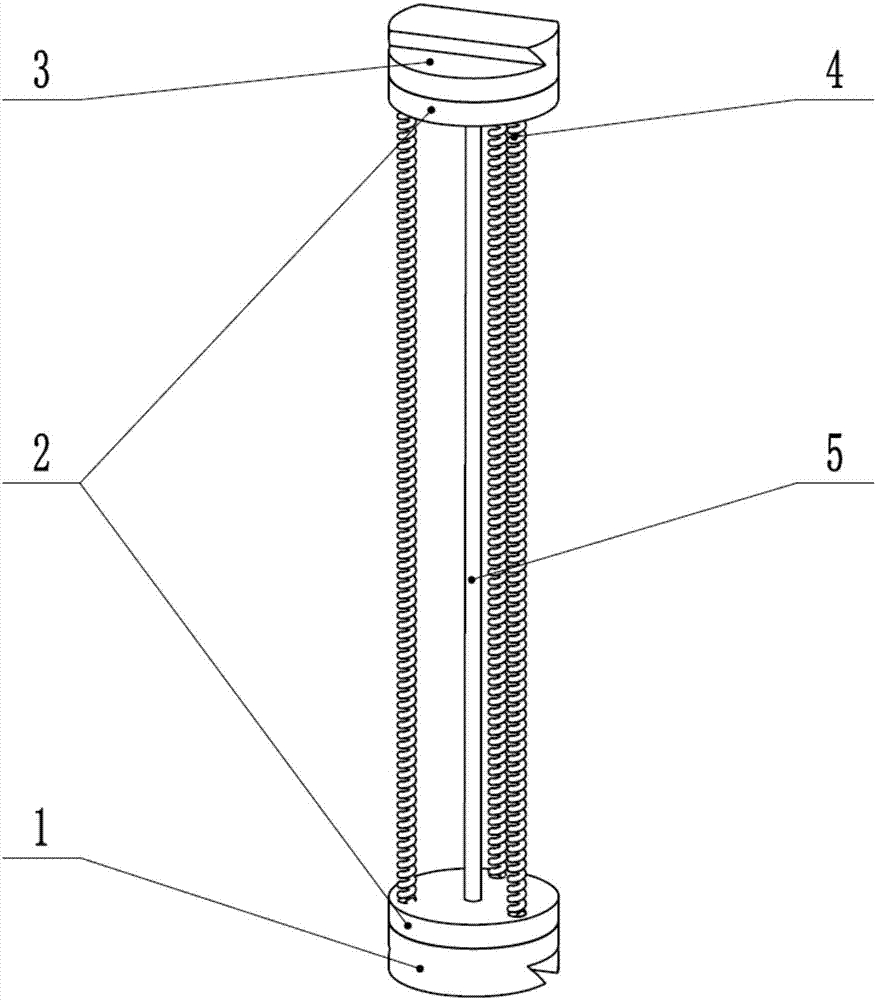
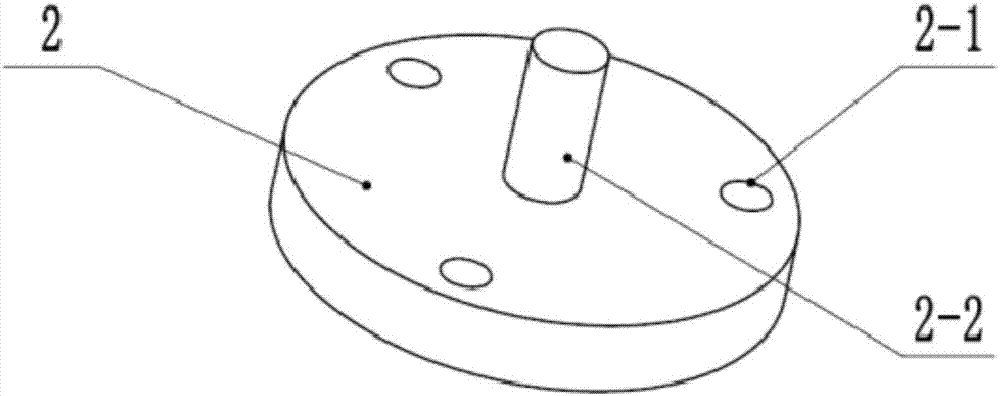
[0014] Specific implementation mode one: combine Figure 1-Figure 6 Describe this embodiment, a modular flexible artificial muscle joint described in this embodiment, which includes a front module interface 1, a rear module interface 3, an elastic support beam 5, two mounting flange assemblies 2 and N artificial muscles 4; N is an integer greater than or equal to 3, one end of the front module interface 1 is fixedly installed with a mounting flange assembly 2, one end of the rear module interface 3 is fixedly installed with another installation flange assembly 2, and the two ends of the elastic support beam 5 are respectively fixed Installed on two mounting flange components 2, N artificial muscles 4 are respectively arranged between the two mounting flange components 2, and the two ends of each artificial muscle 4 are respectively fixedly connected to the two mounting flange components 2, The elastic support beam 5 is arranged at the center of the two mounting flange assembli...
specific Embodiment approach 2
[0015] Specific implementation mode two: combination figure 1 , Figure 4-Figure 6 This embodiment is described. In the modular flexible artificial muscle joint described in this embodiment, one end of the front module interface 1 is processed with a dovetail-shaped protrusion, and one end of the rear module interface 3 is processed with a dovetail-shaped groove. The dovetail-shaped protrusion on the front module interface 1 matches the dovetail-shaped groove on the rear module interface 3. The front module interface 1 and the rear module interface 3 can be quickly connected and disassembled, and multiple modular flexible artificial muscle joints pass through The series or parallel connection can form a multifunctional flexible mechanism, and the others are the same as the first embodiment.
specific Embodiment approach 3
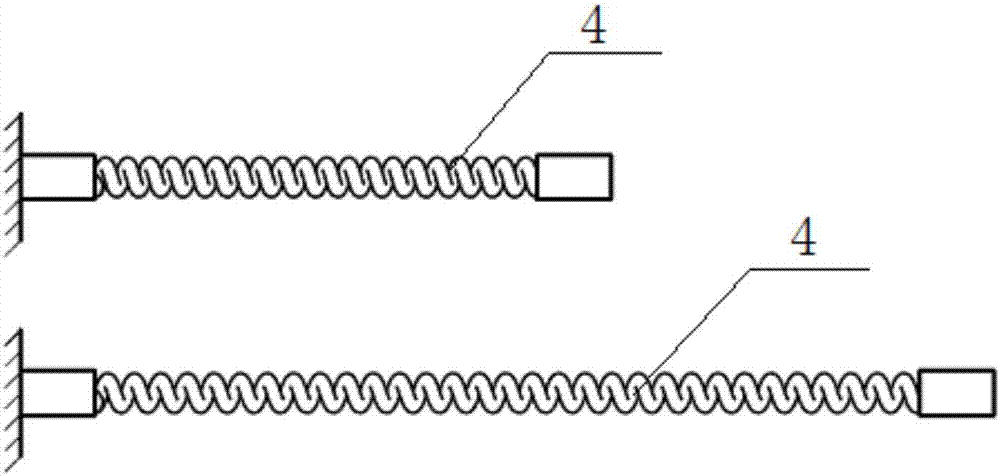
[0016] Specific implementation mode three: combination figure 2 This embodiment is described. In the modular flexible artificial muscle joint described in this embodiment, the initial length of each helical spring is equal to the length of the elastic support beam 5 , and the others are the same as in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More