

Cliff detection method and robot
A detection method and robot technology, which is applied in the field of robots, can solve problems such as inaccurate judgments of robots, and achieve the effect of reducing misjudgments and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
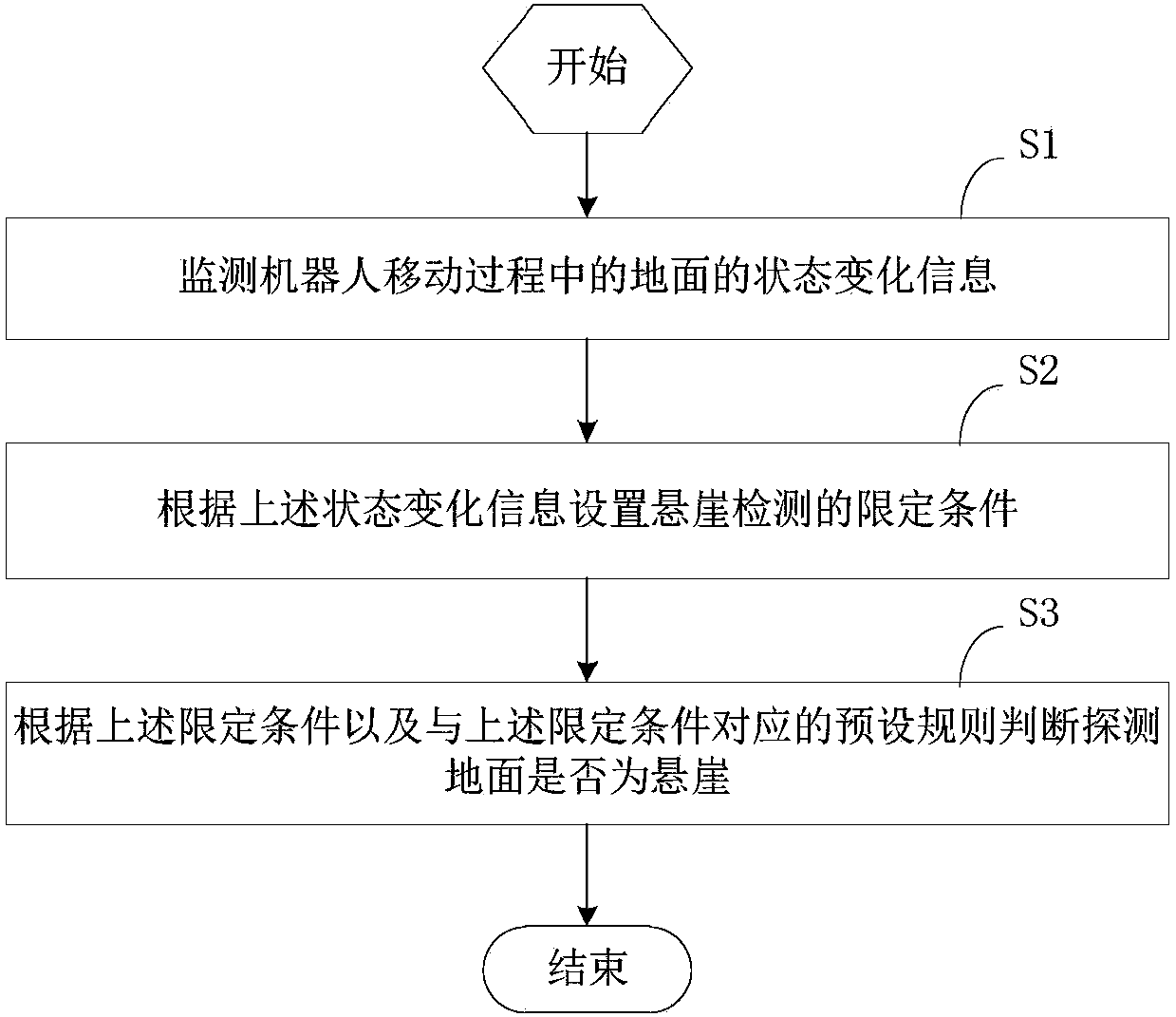
[0090] refer to figure 1 , the cliff detection method of an embodiment of the present invention, comprising:
[0091] S1: Monitor the state change information of the ground during the movement of the robot.
[0092] The state change information in this step includes: changes in the color of the ground, changes in the intensity of reflected light on the ground, changes in the material of the ground, and other information that affects the cliff detection by the infrared sensor. In this embodiment, an indoor sweeping robot with an infrared cliff sensor installed on the bottom shell of the fuselage head is taken as an example, and the robot monitors the status change information of the ground in real time during the moving process.
[0093] S2: Set a limit condition for cliff detection according to the above state chang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More