Hydraulic mechanical gripper having identification positioning function and capable of grabbing rods of various sizes
A technology for identifying positioning and hydraulic machinery, applied in the directions of manipulators, manufacturing tools, chucks, etc., can solve the problems of unreliable grasping of mechanical grippers, low degree of automation, and unadjustable force, so as to adapt to harsh working environments, improve production efficiency, Addressing the effects of poor adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
[0021] In the present invention, terms such as "installation", "connection", "connection" and "fixation" should be interpreted in a broad sense, for example, it can be a fixed connection or a detachable connection, unless otherwise clearly specified and limited. , or integrated; it can be mechanically connected or electrically connected; it can be directly connected or indirectly connected through an intermediary, and it can be the internal communication of two components or the interaction relationship between two components. Those of ordinary skill in the art can understand the specific meanings of the above terms in the present invention according to specific situations.
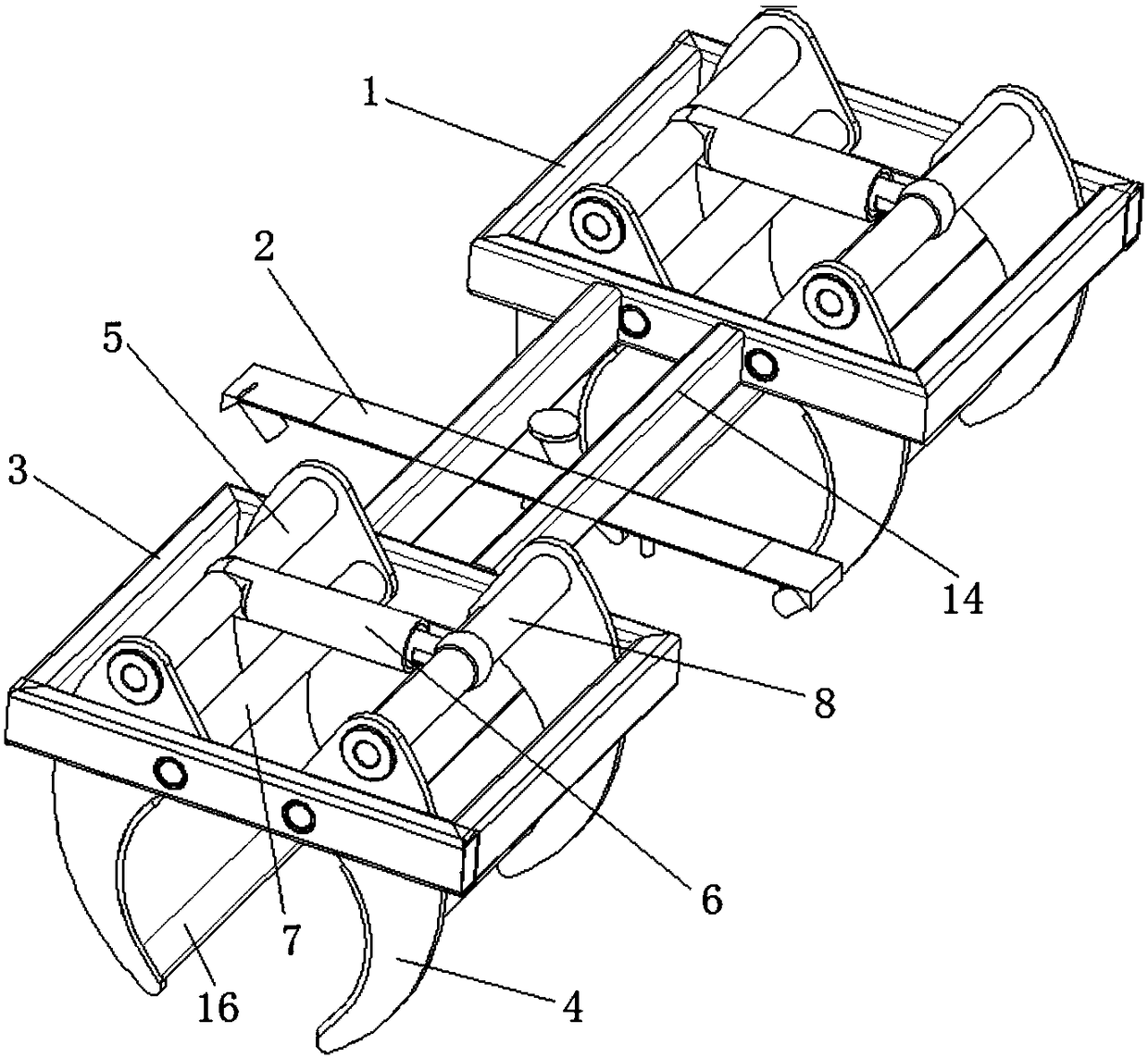
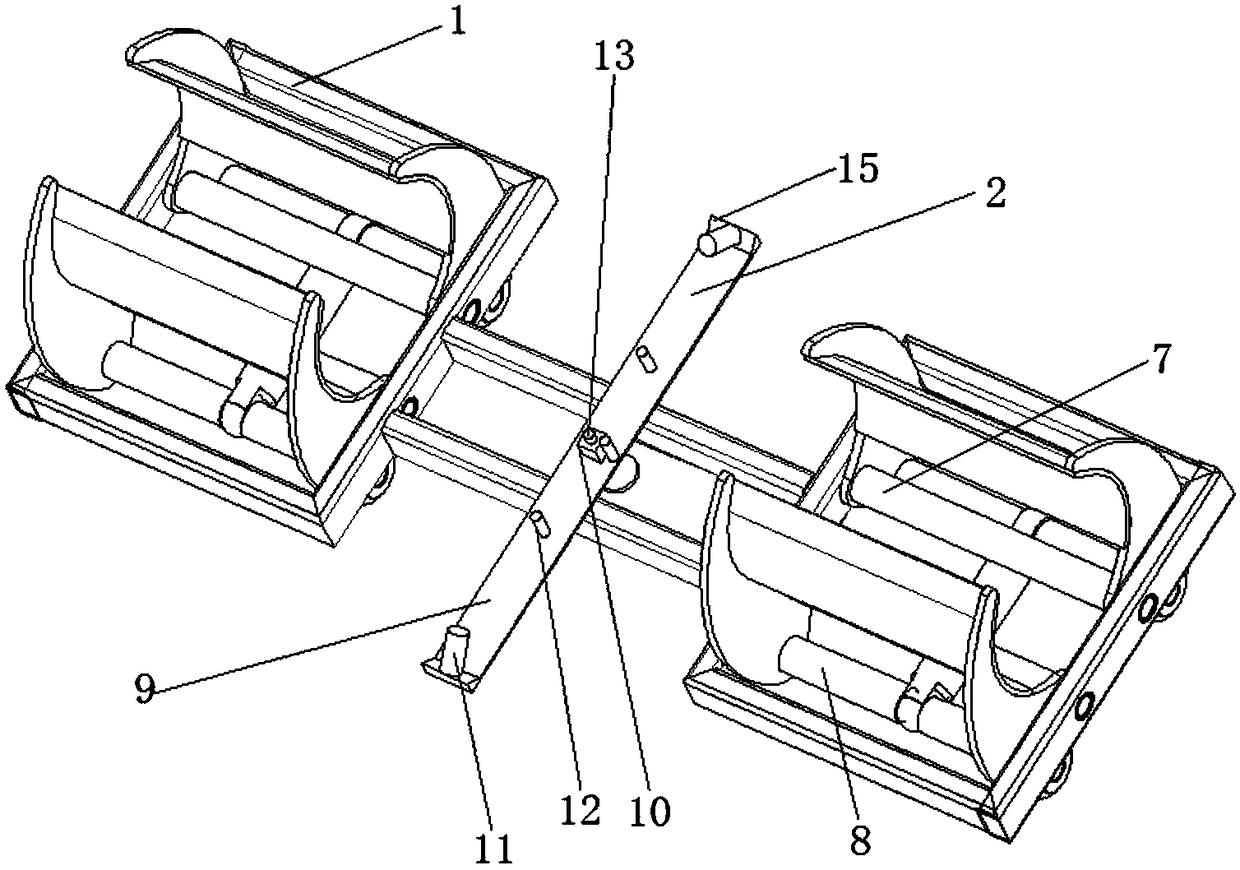
[0022] Such as Figure 1-2 As shown, it is a hydraulic-mechanical gripper of the present invention that can grasp bars of various sizes with identification and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More