

Positioning and navigation method based on depth camera and laser radar device
A technology of laser radar and depth camera, which is applied in the field of automation, can solve the problems of inconvenient use and maintenance, high cost of indoor positioning service hardware, and limited deployment area conditions, so as to improve work efficiency, improve the ability and accuracy of 3D map construction, and reduce cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in further detail below in conjunction with the accompanying drawings.
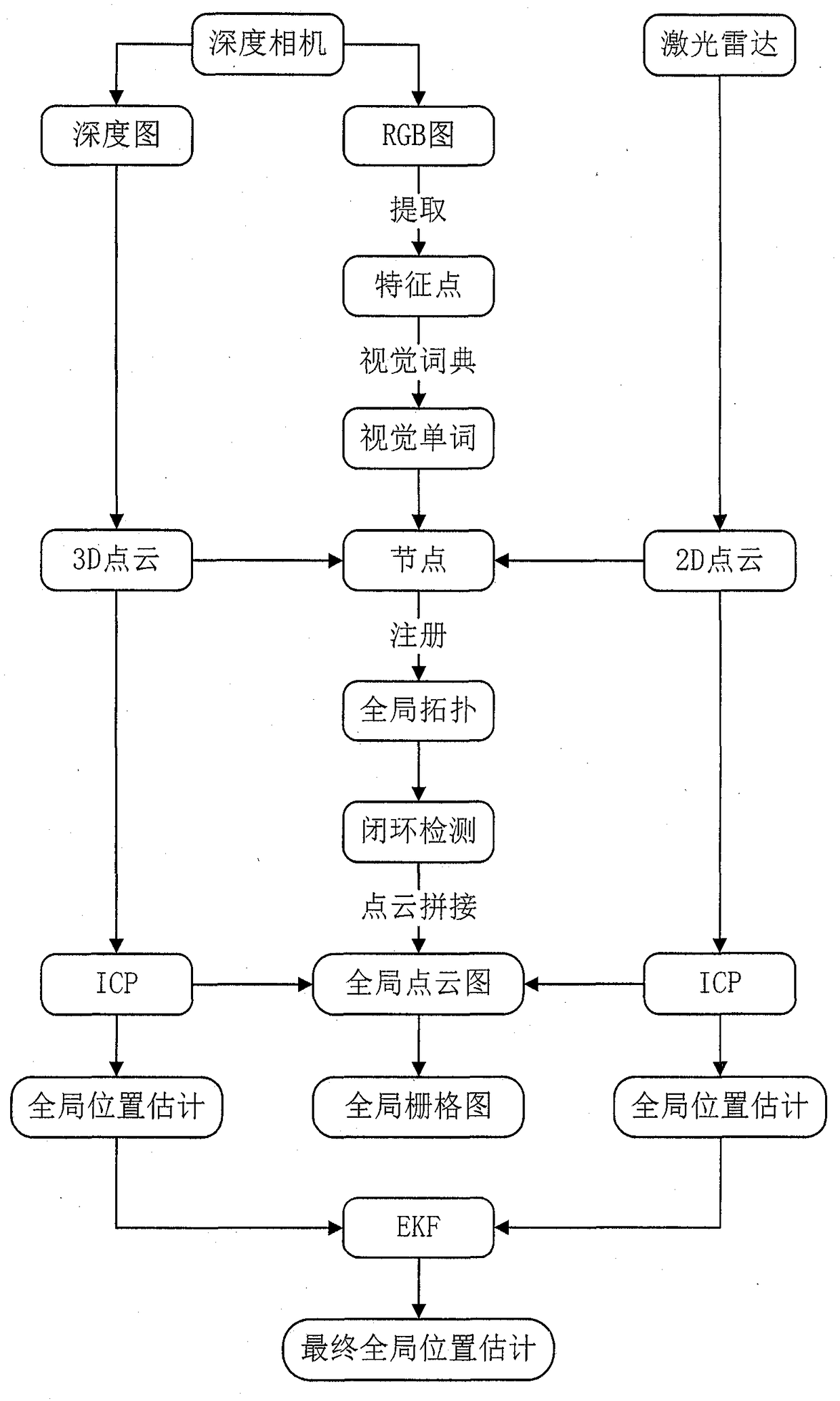
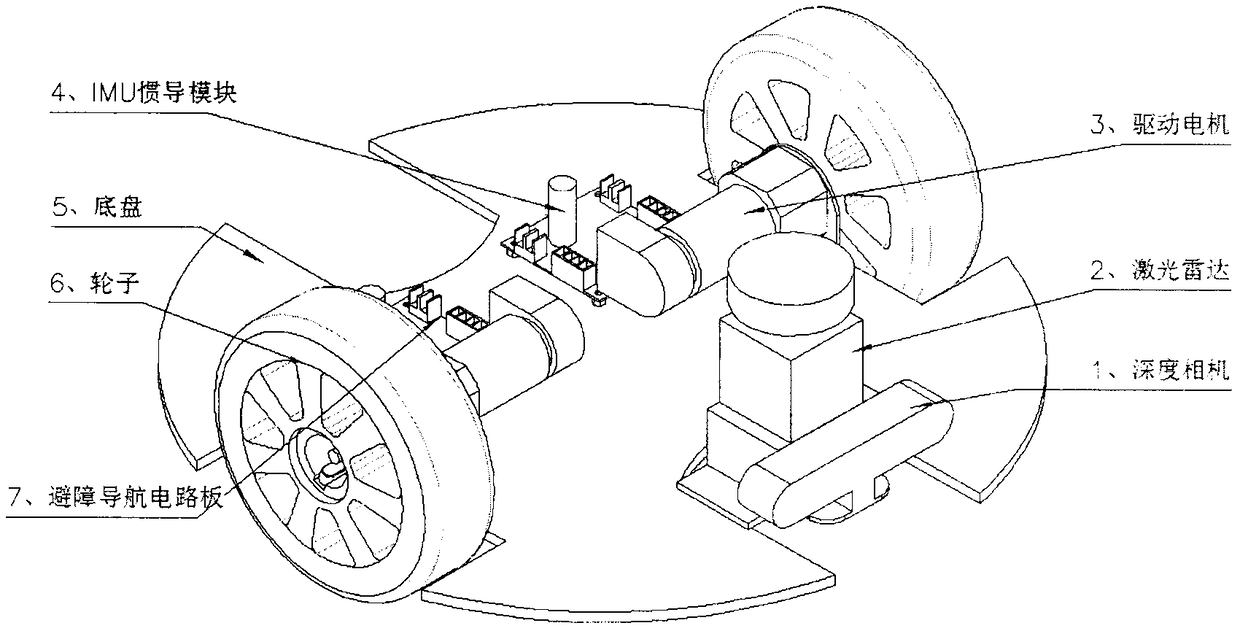
[0023] Such as figure 1 As shown, the present invention includes an autonomous obstacle avoidance navigation system depth camera 1, a laser radar 2, a drive motor 3, a chassis 5, an IMU inertial module 4, and a plurality of ultrasonic sensors (not shown). Among them, a plurality of ultrasonic sensors are respectively installed in Around the chassis 5 of the autonomous obstacle avoidance navigation system, it is responsible for real-time monitoring of obstacles in four directions, and sends the detection results to the obstacle avoidance navigation circuit board 7; The core of the navigation module is responsible for the information interaction among the ultrasonic sensor, depth camera 1, IMU inertial navigation module 4, and laser radar 2 in the system. It extracts the 3D data point cloud of the scene according to the 3D data of the depth camera 1; The navig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More