

Collaborative robot joint position stopper
A technology of robot joints and stoppers, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of large installation space, inability to comply with the development trend of integrated collaborative robots, and complex structure, so as to reduce installation space, compact structure, and improve reliability. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
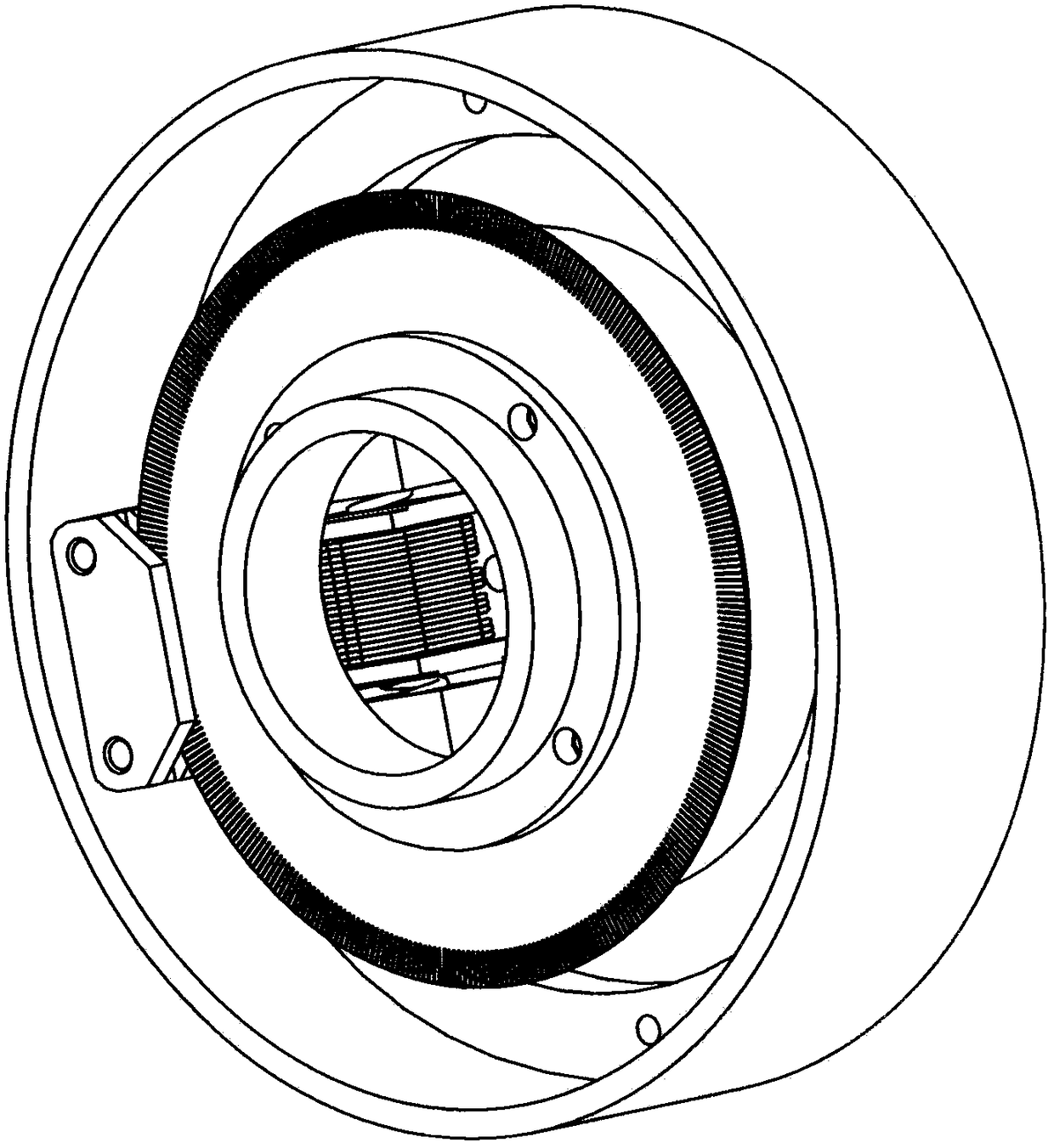
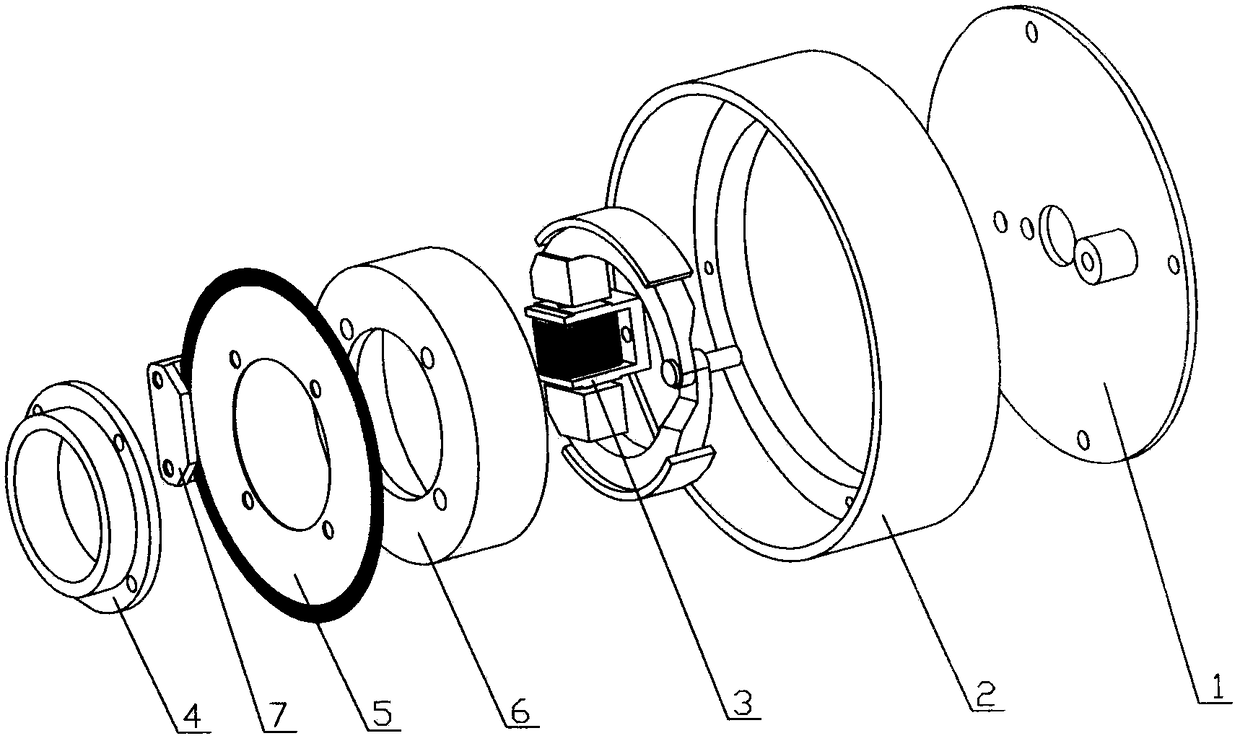
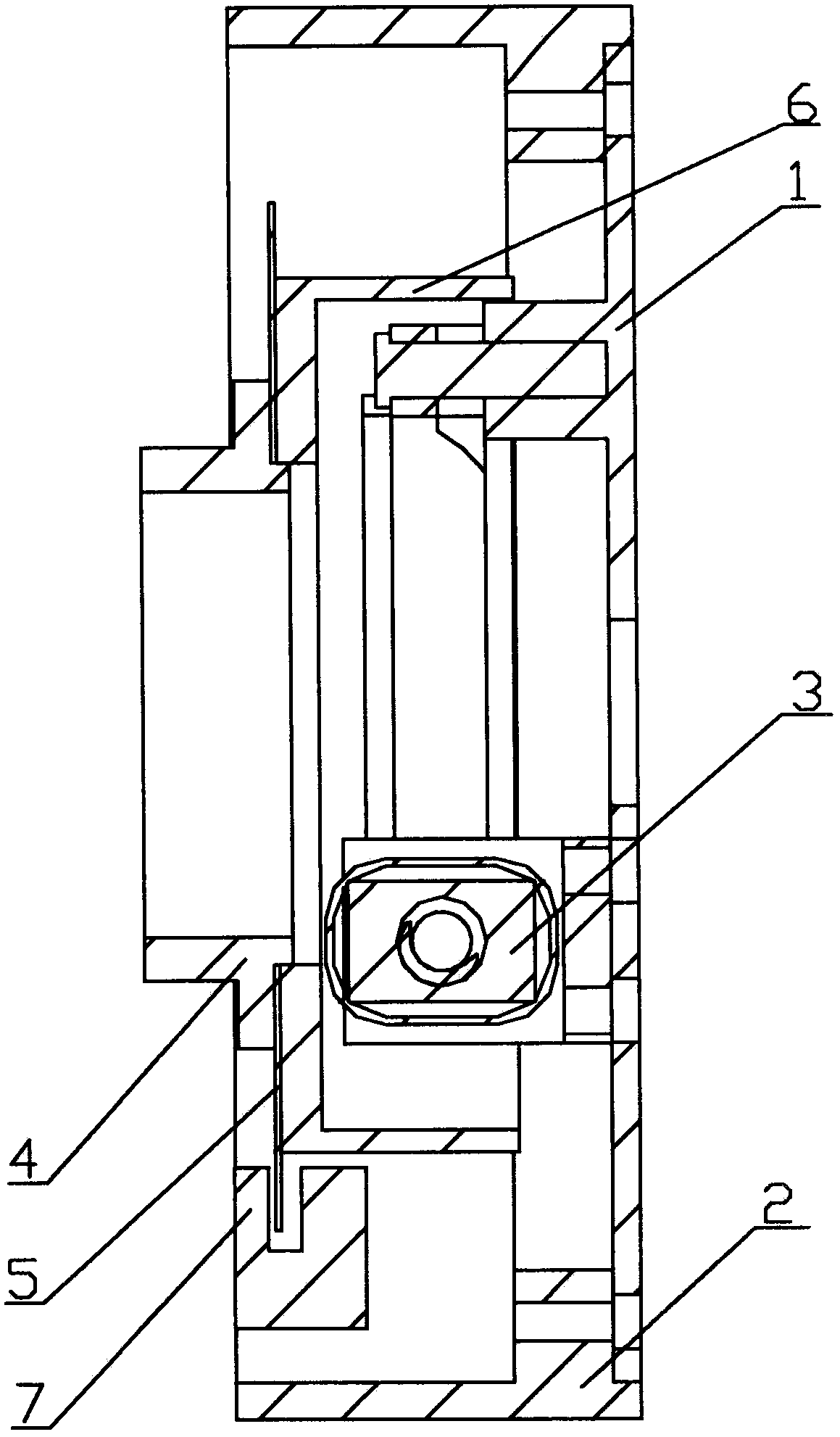
[0014] Such as Figure 1-Figure 4 As shown, this specific embodiment adopts the following technical solutions: it includes a base plate 1, a housing 2, an electromagnetic expansion brake device 3, a rotor shaft 4, a circular grating 5, a brake disc 6 and a grating read head 7, and the base plate 1 It is fixedly connected with the housing 2, and the inner side of the bottom plate 1 is fixedly installed with an electromagnetic expansion brake device 3. The rotor shaft 4, the circular grating 5 and the brake disc 6 are fixedly connected, and the circular grating 5 is installed on the rotor shaft 4 and the brake disc 6. In the middle of the brake disc 6, a grating reading head 7 is installed on one side of the circular grating 5, and the grating reading head 7 can be fixedly installed on the robot joint housing, wherein the electromagnetic expansion brake device 3 includes a spring 301, an electromagnet 302, armature 303, expansion brake body 304, brake pad 305 and pin shaft 306, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More