

Six-rod thirty-cable flexible tension integrated robot
A tensegrity and robotic technology, applied in the field of robotics, can solve the problems of low fault tolerance and achieve low cost, good stability, and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
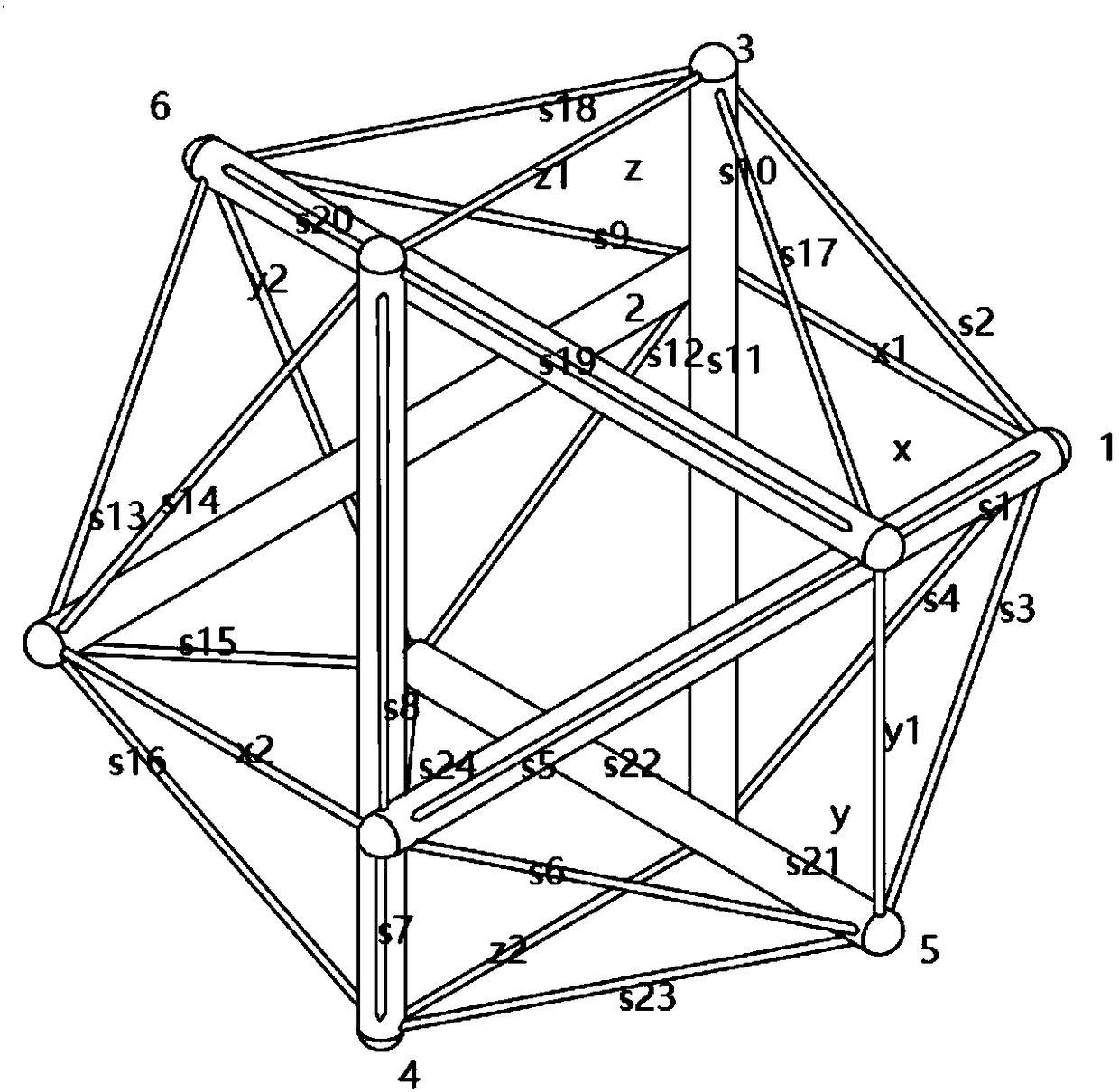
[0019] The invention provides a flexible tensioning integral robot with six rods and thirty cables.
[0020] Such as figure 1 As shown, the robot includes three pairs of parallel electric push rods (respectively 1, 2, 3, 4, 5, 6), 24 elastic-rigid composite cables (respectively s1-s24) and 6 elastic cables (respectively x, x1, x2, y, y1, y2, z, z1, z2), the ends of each pair of parallel electric push rods are connected by elastic cables to form three planes that are perpendicular to each other and whose centers coincide. The vertices are connected to four points on different surrounding surfaces through elastic-rigid composite cables to form a skeleton structure; the central control chip and battery are suspended in the cavity in the middle of the struc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More