Method and apparatus for the start-up operation of multi-axis system
A control device and coordinate system technology, applied in general control systems, TV system components, control/adjustment systems, etc., can solve problems such as difficult identification of multi-axis systems and error-prone
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
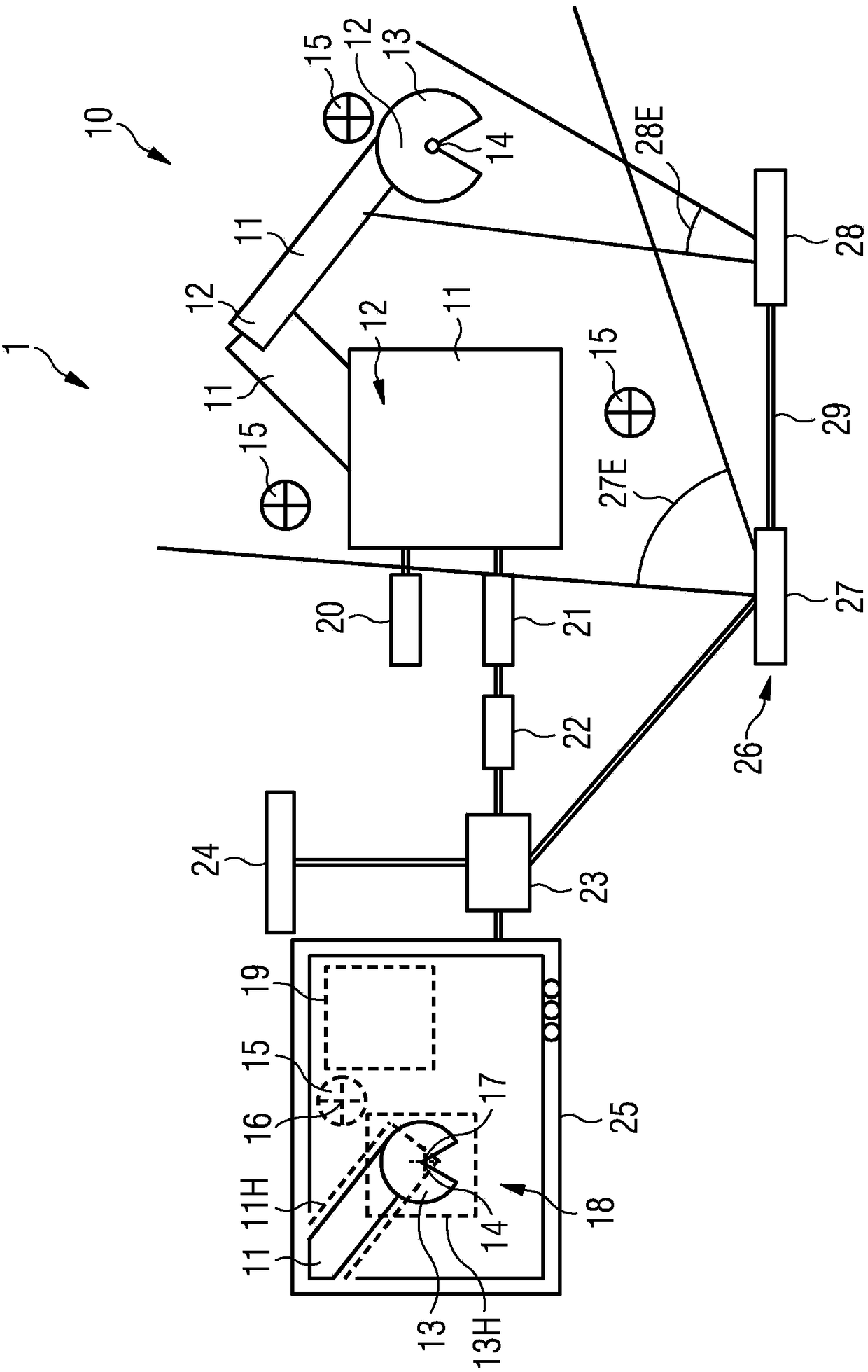
[0029] figure 1 The device 1 according to the invention for starting a multi-axis system 10 is shown schematically. The multi-axis system 10 can be, for example, an industrial robot, a production or packaging machine tool, a CNC milling machine, a shipping crane or the like. However, a multi-axis system can also be understood as a production cell with a number of machines of this type.
[0030] exist figure 1 In the schematic diagram of , the multi-axis system 10 includes a plurality of segments 11 which are connected to each other in pairs via hinges 12 . For example, a tool 13 with a TCP (Tool Center Point) 14 is arranged at the free end of the last section 11 . The tool position of the multi-axis system 10 is described using TCP. The TCP is a reference point located at a suitable location on the tool 13 .
[0031] The movement of the multi-axis system 10 is controlled by a control device 20 . Control means, such as a programmable logic controller (SPS), may be provide...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap