

Nine-freedom-degree picking mechanical arm
A technology with a degree of freedom and a manipulator, which is applied in the direction of picking machines, manipulators, agricultural machinery and tools, etc., can solve the problems of increasing the cost of mechanized picking, the promotion of agricultural picking machinery, large fruit damage, and inflexible grasping, etc., to reduce picking costs , large working space and flexible grasping action
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Below in conjunction with accompanying drawing, the present invention will be further described:
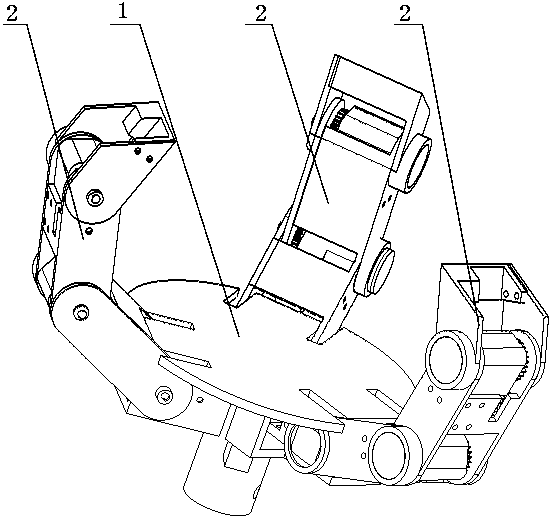
[0031] Figure 1 to Figure 8 An embodiment of the nine-degree-of-freedom picking manipulator of the present invention is shown. figure 1 It is a structural schematic diagram of a nine-degree-of-freedom picking manipulator in this embodiment.
[0032] like figure 1 As shown, the nine-degree-of-freedom picking manipulator in this embodiment includes a palm 1 and three fingers 2, and each finger 2 has three rotational degrees of freedom and can move flexibly.
[0033] Preferably, the palm 1 is a circular plate structure or a disk-shaped structure or a round bowl-shaped structure, and the three fingers 2 are evenly distributed on the circumference of the palm 1 . In this embodiment, the palm 1 adopts a circular plate structure.
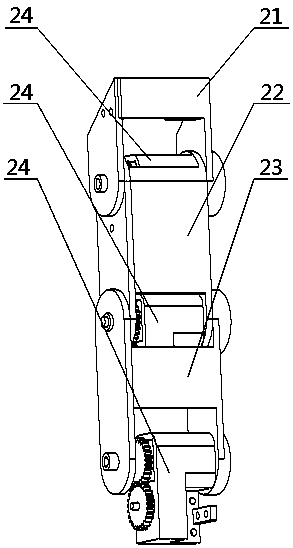
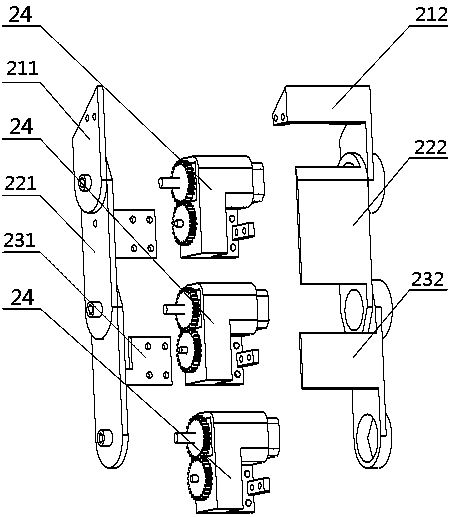
[0034] like figure 1 , figure 2 and image 3 as shown, figure 2 It is a schematic diagram of the structure of a single finger in this embod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More