

Control system and method for learning variable impedance
A control system and control method technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as expensive, robot or workpiece damage, time-consuming sampling data, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The following examples describe the present invention in more detail.
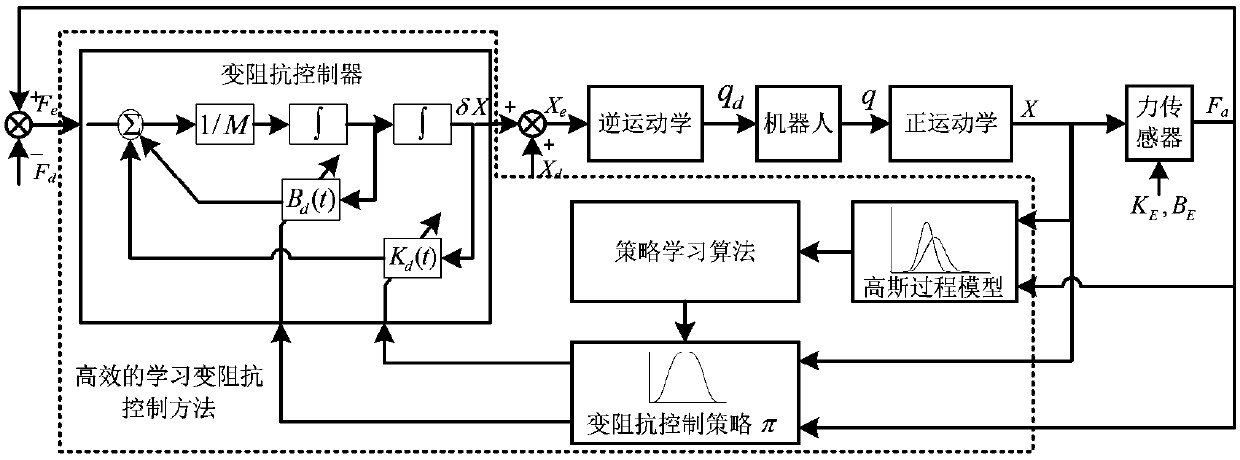
[0066] Such as figure 1 Shown is the system structure diagram of the learning variable impedance control method, each part in the dotted line box is the specific structure of the present invention, including the variable impedance controller, the Gaussian process model of the system, the variable impedance control strategy and the strategy learning algorithm. Specifically:
[0067] 1) The variable impedance controller is based on the time-varying target stiffness, damping coefficient and current contact force error F e Correct the expected reference trajectory, and calculate the expected position increment δX at the end of the output manipulator;
[0068] 2) According to the actual position X of the end of the robot and the information F of the force sensor according to the sampling data a Establish the Gaussian process model of the system as the transformation dynamics model of the system;
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More