

Method for planning real-time motion of mobile robot based on human behavior simulation
A mobile robot and motion planning technology, applied in the field of robotics, to ensure safety, improve robustness and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to enable those skilled in the art to better understand the solution of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
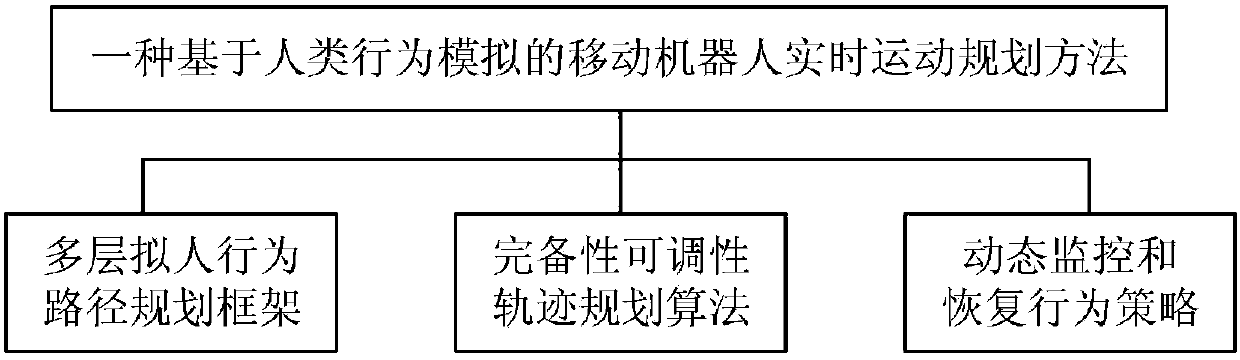
[0050] Such as figure 1 As shown, the real-time motion planning method of mobile robot based on human behavior simulation mainly includes: (1) multi-layer anthropomorphic behavior path planning framework, (2) complete and adjustable trajectory planning algorithm, (3) dynamic monitoring and recovery behavior strategy.
[0051] The specific operation of the above motion planning method is as follows:
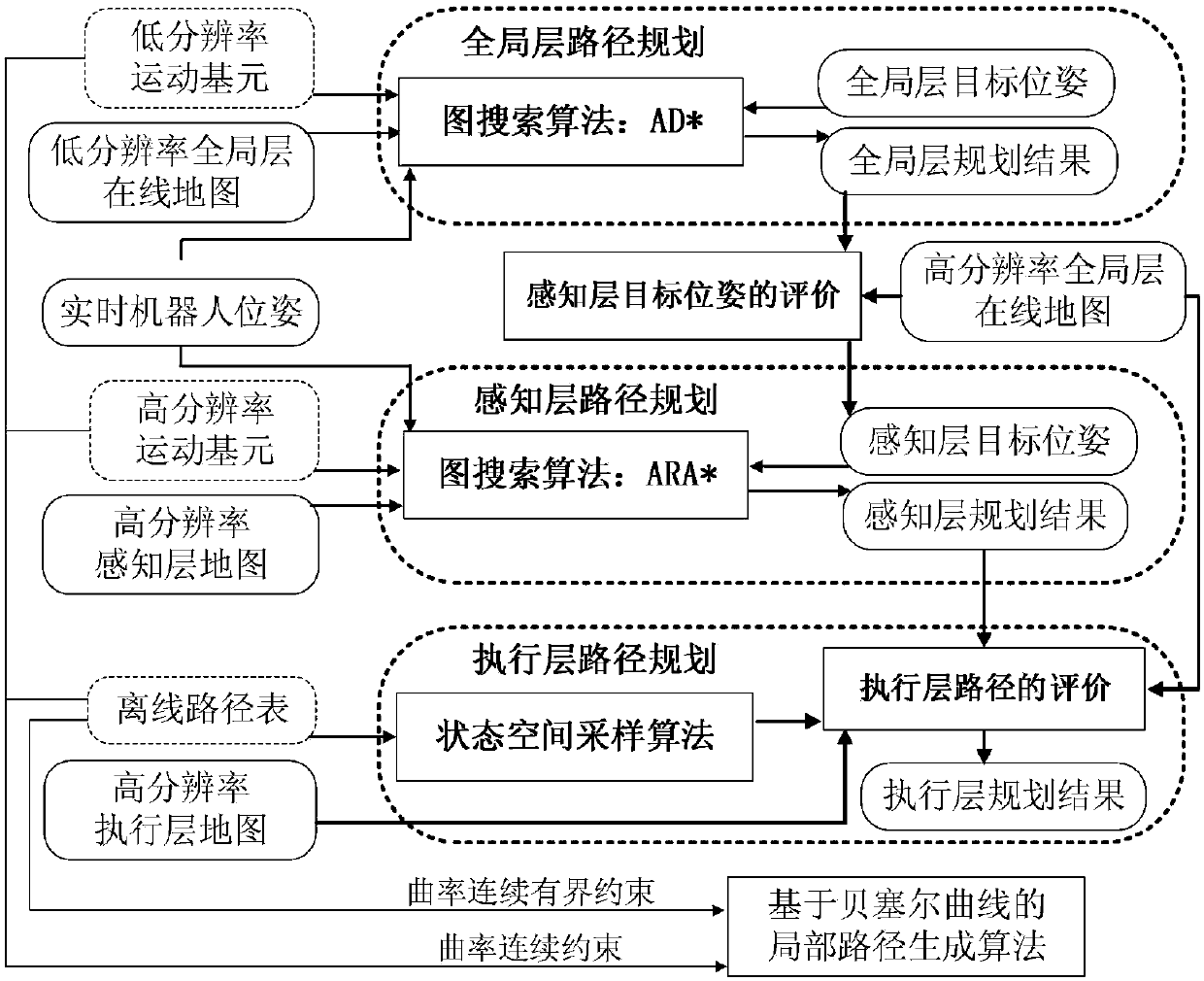
[0052] (1) Multi-layer anthropomorphic behavior path planning framework;
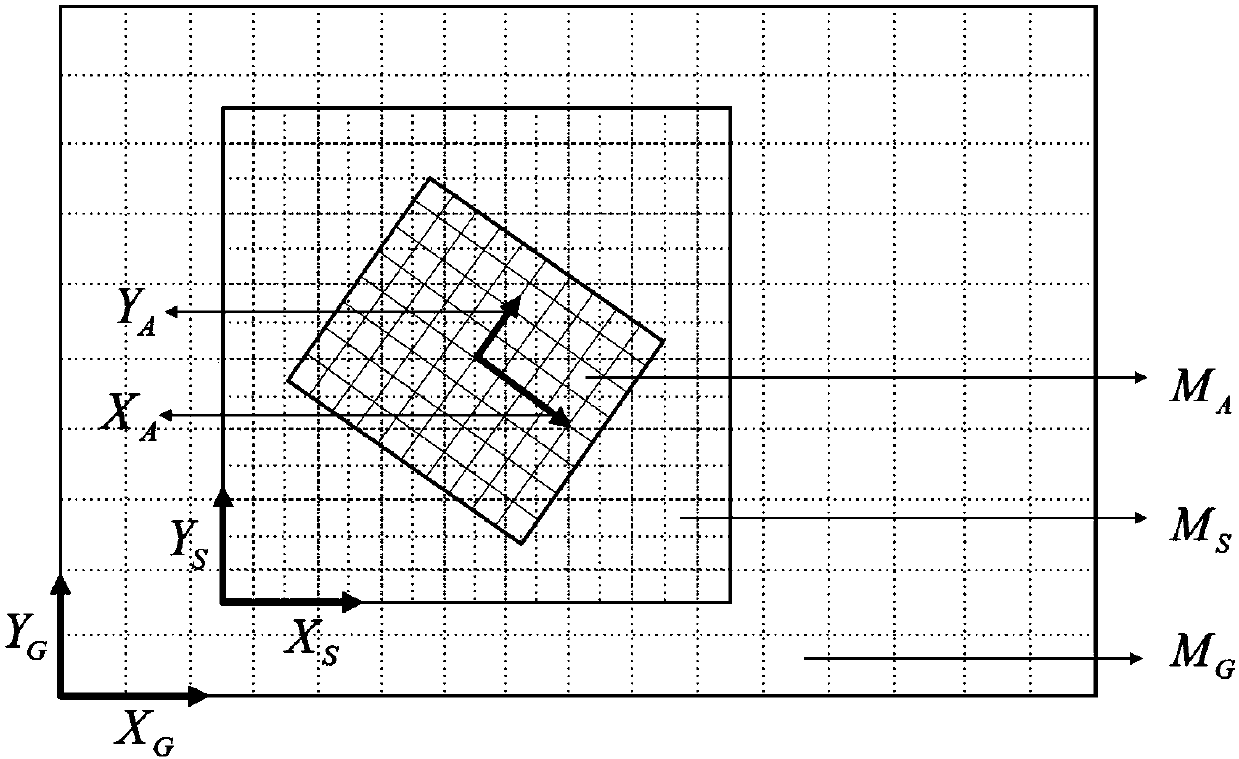
[0053] Referring to the behavior pattern of human planning, the global layer path planning, perception layer path planning, and execution layer path planning are respectively set corresponding to the human brain, human eyes, and human legs. The map and coordinate system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More