

Robot navigation method and system based on multi-line laser radar
A multi-line laser and navigation system technology, applied in the field of robot navigation system and system based on multi-line laser radar, can solve the problems of sparse points, uneven distribution, ignoring path information, etc., to improve accuracy and improve path planning Effects on obstacle avoidance, good generalization and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0039] In one or more implementations, a multi-line lidar-based robot navigation method is disclosed, which mainly includes the following process:
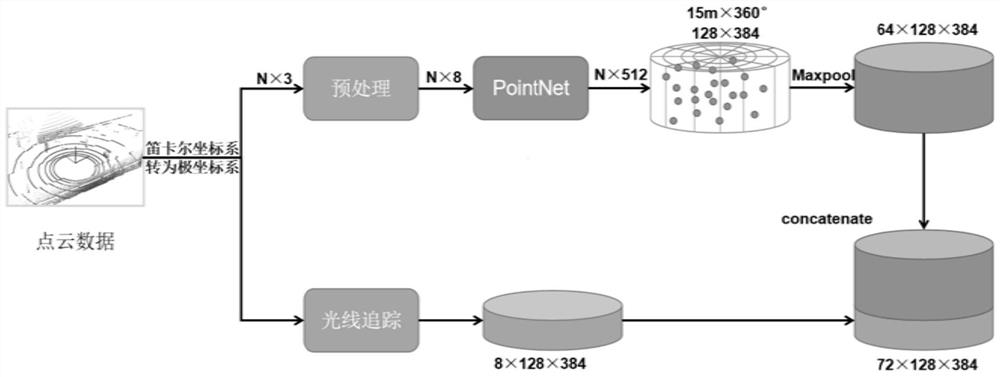
[0040] (1) Obtain the point cloud data in the set area around the robot, and convert the point cloud data from the Cartesian coordinate system to the form of polar coordinates;
[0041] (2) Calculate the high-dimensional feature and the visibility feature of each point cloud data respectively, and superimpose the visibility feature and the high-dimensional feature data to obtain the total feature extracted by fusion;
[0042] Specifically, through preprocessing operations, each point cloud data is composed of The three dimensions expand to become eight dimensions, of which, Respectively represent the relative radius, corner and height from this point to the center of the fan column to which it belongs; r represents the radius, Represents the angle, z represents the height, x represents the length of the x-axis, and y repres...
Embodiment 2
[0081] In one or more implementations, a robot navigation system based on multi-line lidar is disclosed, including:
[0082] A data acquisition module, configured to acquire point cloud data in a set area around the robot, and convert the point cloud data from a Cartesian coordinate system to a form of polar coordinates;
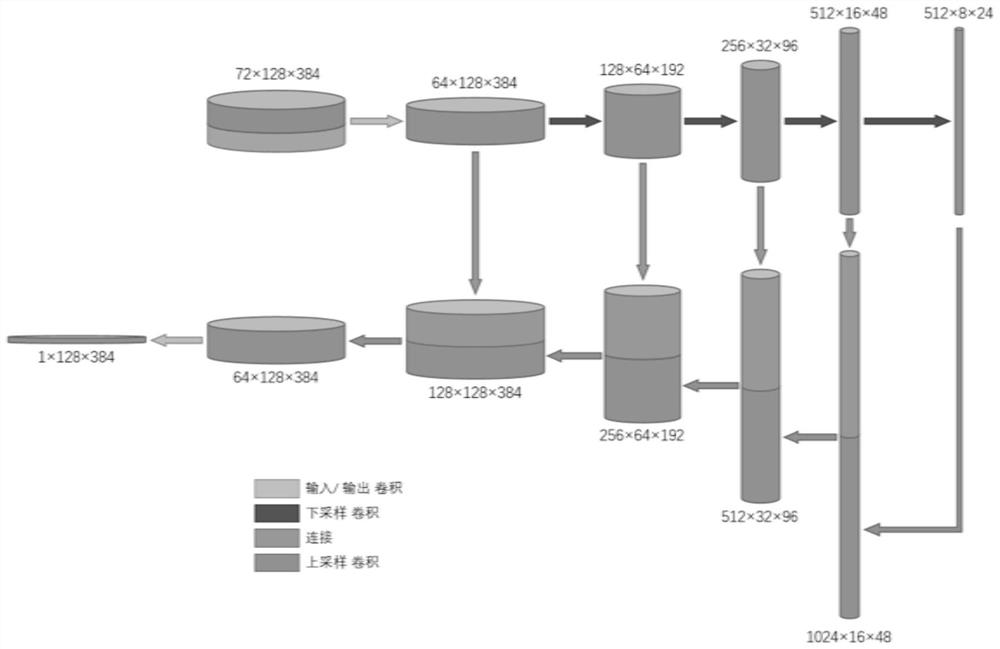
[0083] The perception module is used to separately calculate the high-dimensional features and visibility features of each point cloud data, and superimpose the visibility features and high-dimensional feature data to obtain the total features extracted by fusion; use U-Net as the basic framework for Divide the task, obtain the feasible area in the set area around the current robot, and perform normalization processing;
[0084] The planning control module is used to obtain the data in front of the robot and the data on the left and right sides respectively based on the normalized feasible area, and determine whether to enter the obstacle avoidance state bas...
Embodiment 3
[0087] In one or more embodiments, a terminal device is disclosed, including a server, the server includes a memory, a processor, and a computer program stored on the memory and operable on the processor, and the processor executes the The program realizes the robot navigation method based on multi-line laser radar in the first embodiment. For the sake of brevity, details are not repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More