

Multi-mode touch sensing device
A tactile perception, multi-modal technology, applied in the direction of manipulators, manufacturing tools, etc., to achieve the effect of easy identification, less cracks, and protection from wear and tear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
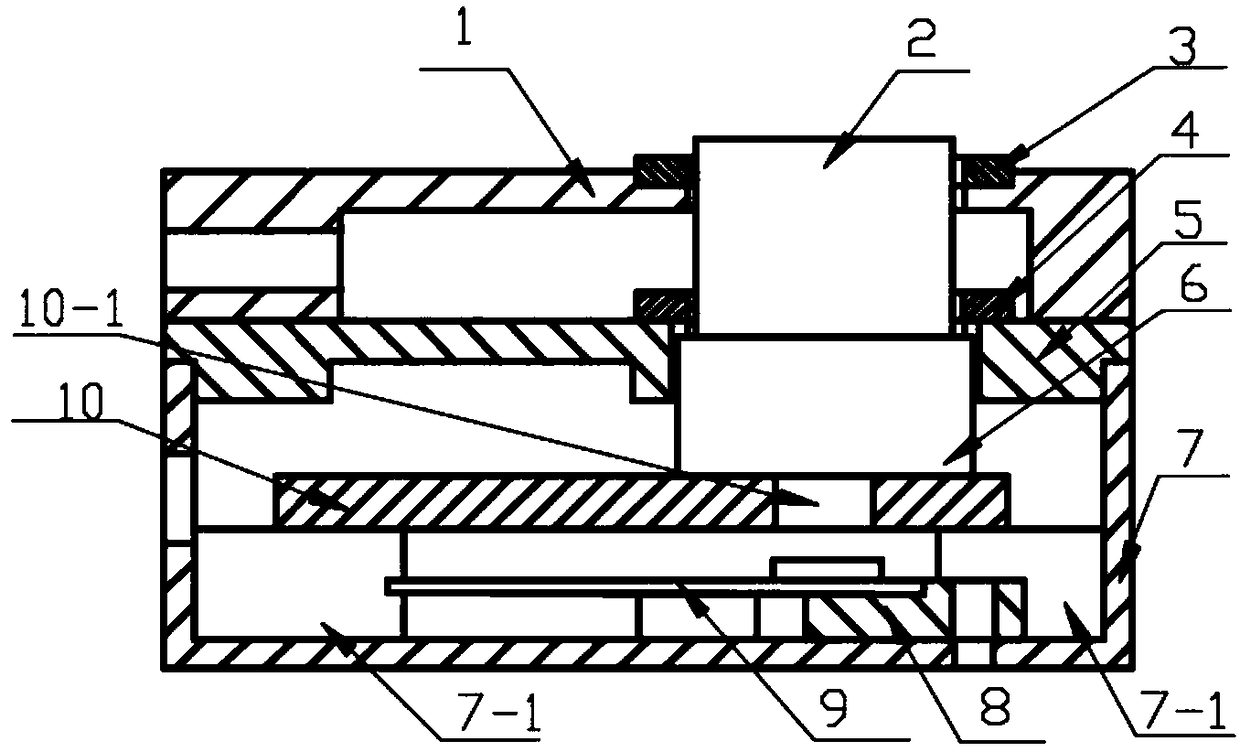
[0022] A multi-modal tactile sensing device proposed by the present invention is described in detail in conjunction with the accompanying drawings and embodiments as follows:
[0023] The overall structure of a multi-modal tactile sensing device proposed by the present invention is as follows: figure 1 As shown, the tactile sensing device is worn on the fingertips of the robot dexterous hand, and includes a shell composed of a U-shaped base 7 and a top cover 1, and an image acquisition camera 9, a multi-array pressure sensor 10, and a plurality of supports are arranged inside the shell. Structural components and a transparent elastic body 2, and the upper part of the transparent elastic body 2 protrudes from the top cover 1; wherein, the image acquisition camera 9 is fixedly connected to the base 7 through the camera support plate 8, and the multi-array pressure sensor 10 is located above the image acquisition camera 9 And it is supported by the shoulders 7-1 fixed on the four...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Focal length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More