Real-time three-dimensional modeling method and system based on depth image acquisition equipment
A technology for collecting equipment and depth images, which is applied in the field of 3D modeling, can solve the problems of complex and expensive equipment, low modeling accuracy, and high cost, and achieve the effect of reducing cost, reducing complexity, and simple equipment structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
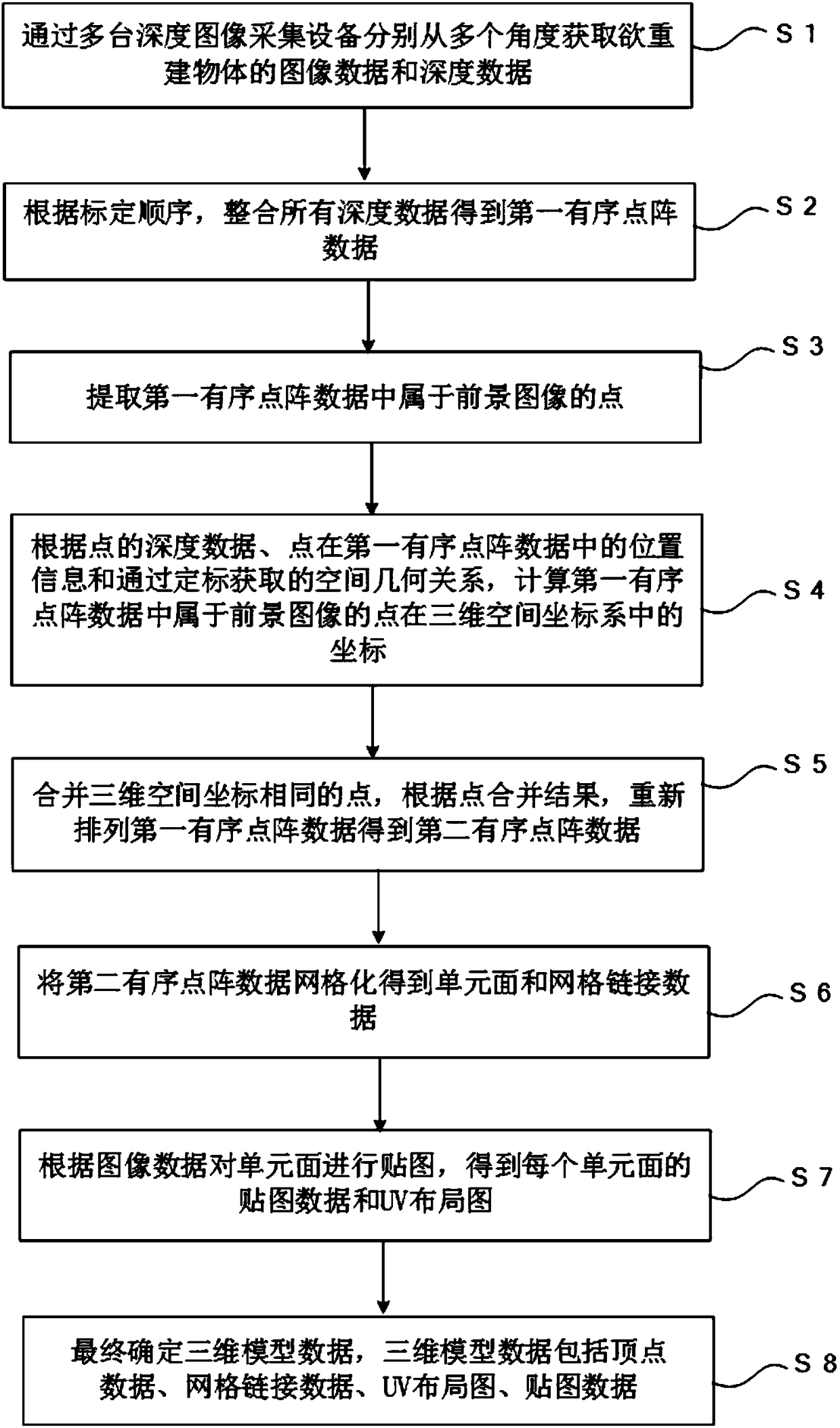
[0024] Such as figure 1 As shown, a real-time three-dimensional modeling method based on a depth image acquisition device provided in this embodiment includes:
[0025] In step S1, image data and depth data of an object to be reconstructed are acquired from multiple angles through multiple depth image acquisition devices.
[0026] Wherein, the depth image collection device is a device that can collect images and the depth corresponding to the images, and an rgb-d camera (such as Kinect) can be selected, and the rgb-d camera can directly output image data and depth data. Depth image acquisition equipment can also use a combination of camera and distance measuring device. Through calibration, the relationship between the image data output by the camera and the depth data output by the distance measuring device can be obtained, but it must be ensured that the image data collected by the camera is consistent with The depth data output by the ranging device are in the same proport...
Embodiment 2
[0044] Based on the same inventive concept as the above-mentioned real-time 3D modeling method, this embodiment provides a real-time 3D modeling system based on depth image acquisition equipment, including: multiple depth image acquisition equipment and processing units that have been calibrated in advance; Multiple depth image acquisition devices are connected to the processing unit;
[0045] The depth image acquisition device is used to acquire image data and depth data from different angles of the object to be reconstructed, and output them to the processing unit;
[0046] The processing unit is used to integrate all the depth data according to the calibration order to obtain the first ordered lattice; extract the points belonging to the foreground image in the first ordered lattice; Position information and the spatial geometric relationship obtained through calibration, calculate the coordinates of the points belonging to the foreground image in the first ordered lattice ...
Embodiment 3
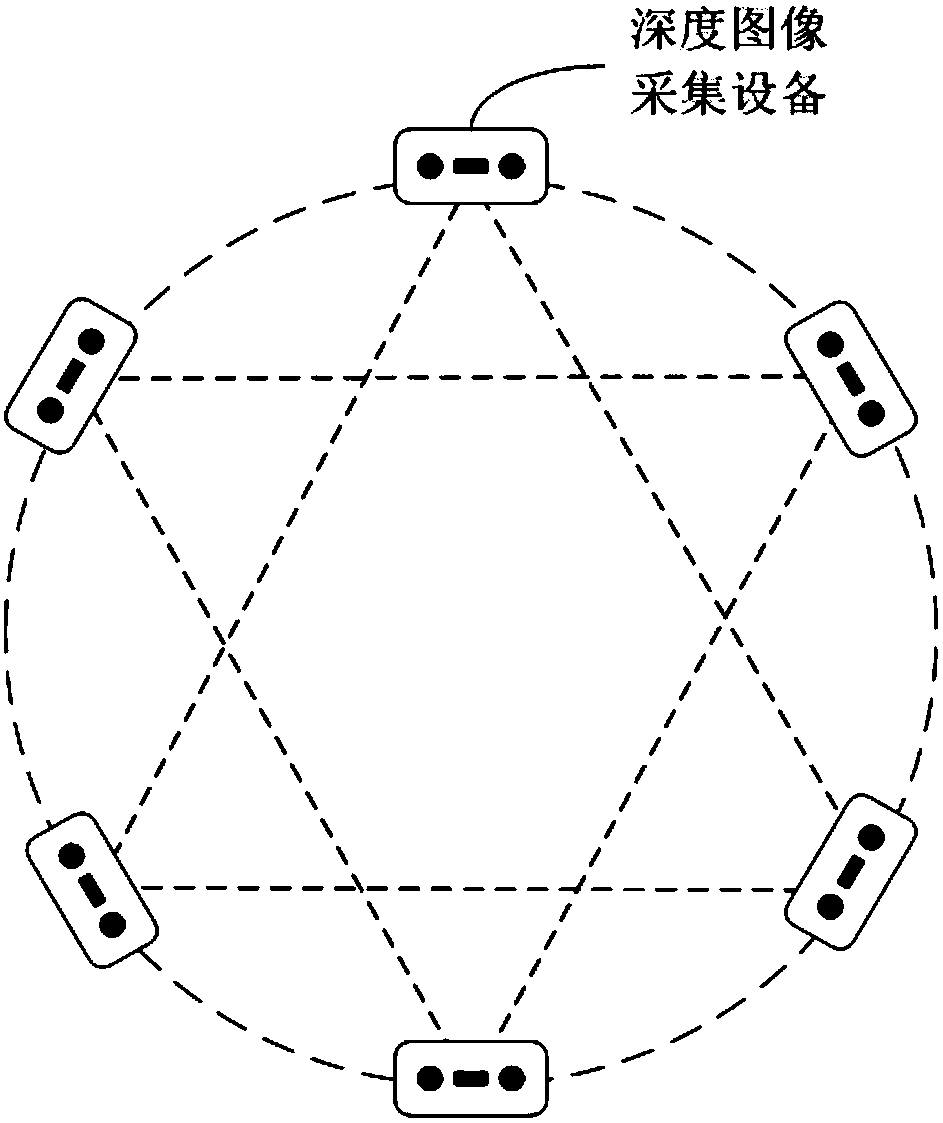
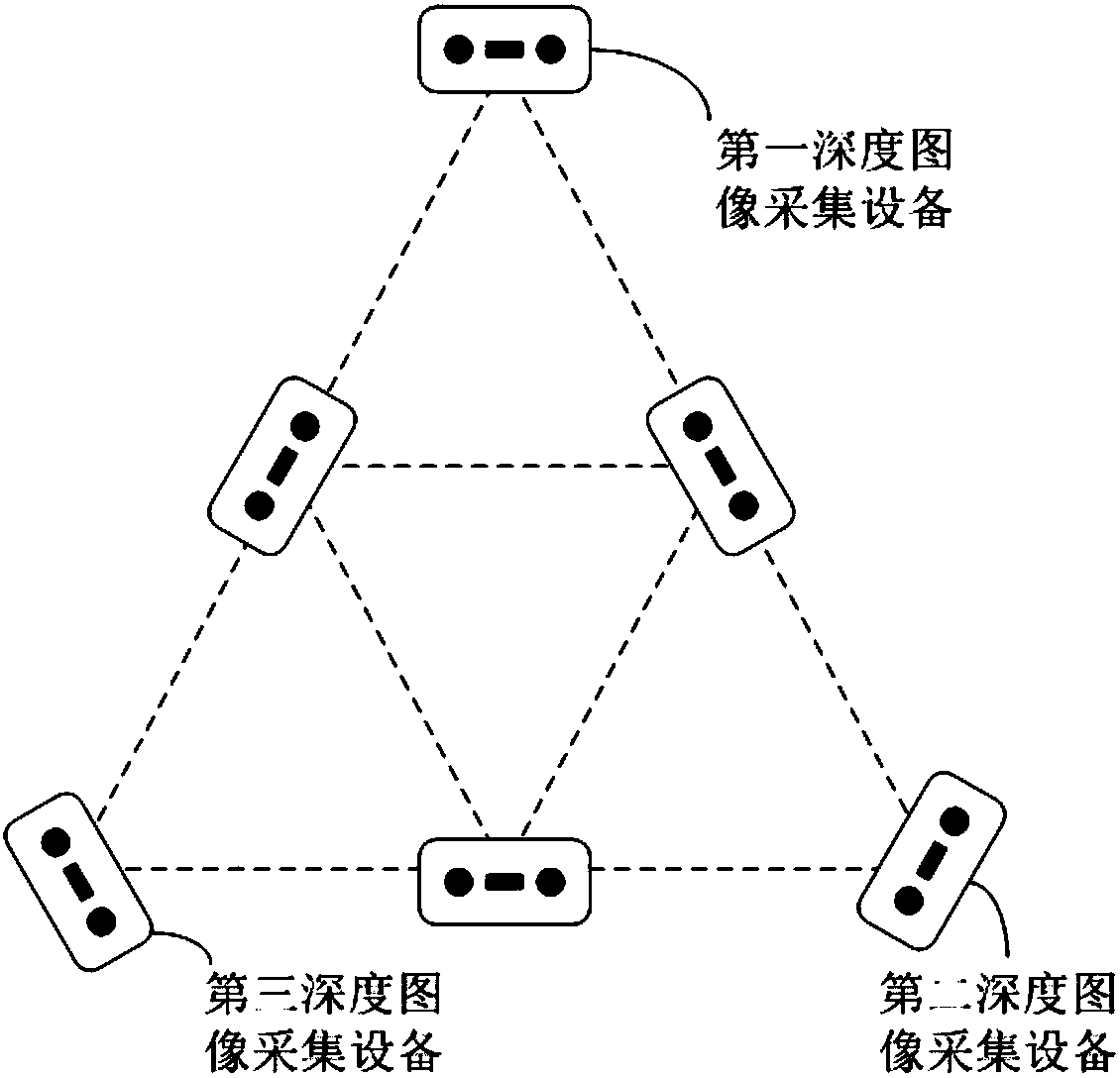
[0049] When shooting an object, at least 3 cameras are needed to obtain a complete image of the object, and the 3 cameras need to be arranged in an equilateral triangle. Therefore, on the basis of Embodiment 2, in order to simplify the system, reduce costs, and ensure the accuracy of modeling, this embodiment provides another real-time 3D modeling system based on depth image acquisition equipment, including pre-calibrated 3N depth image acquisition devices and processing units. 3N depth image acquisition devices are all connected to the processing unit. N is a natural number greater than 0. The positions of every three depth image acquisition devices form an equilateral triangle. N groups of depth image acquisition devices shoot the object to be reconstructed from different angles. The shooting directions of the 3N depth image acquisition devices all point to the object to be reconstructed. Each depth image acquisition device acquires data at an angle of 60 degrees. The obje...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More