

Non-pump dual-push-rod hydraulic assistant robot and control method thereof
A walking-assisting robot and push rod technology, which is applied in the fields of aids to help people walk, medical science, diagnosis, etc., can solve the problems of complex mechanism, large energy consumption, and short battery life of the walking-assisting robot, and achieve light structure, reduce Energy consumption, the effect of increasing battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
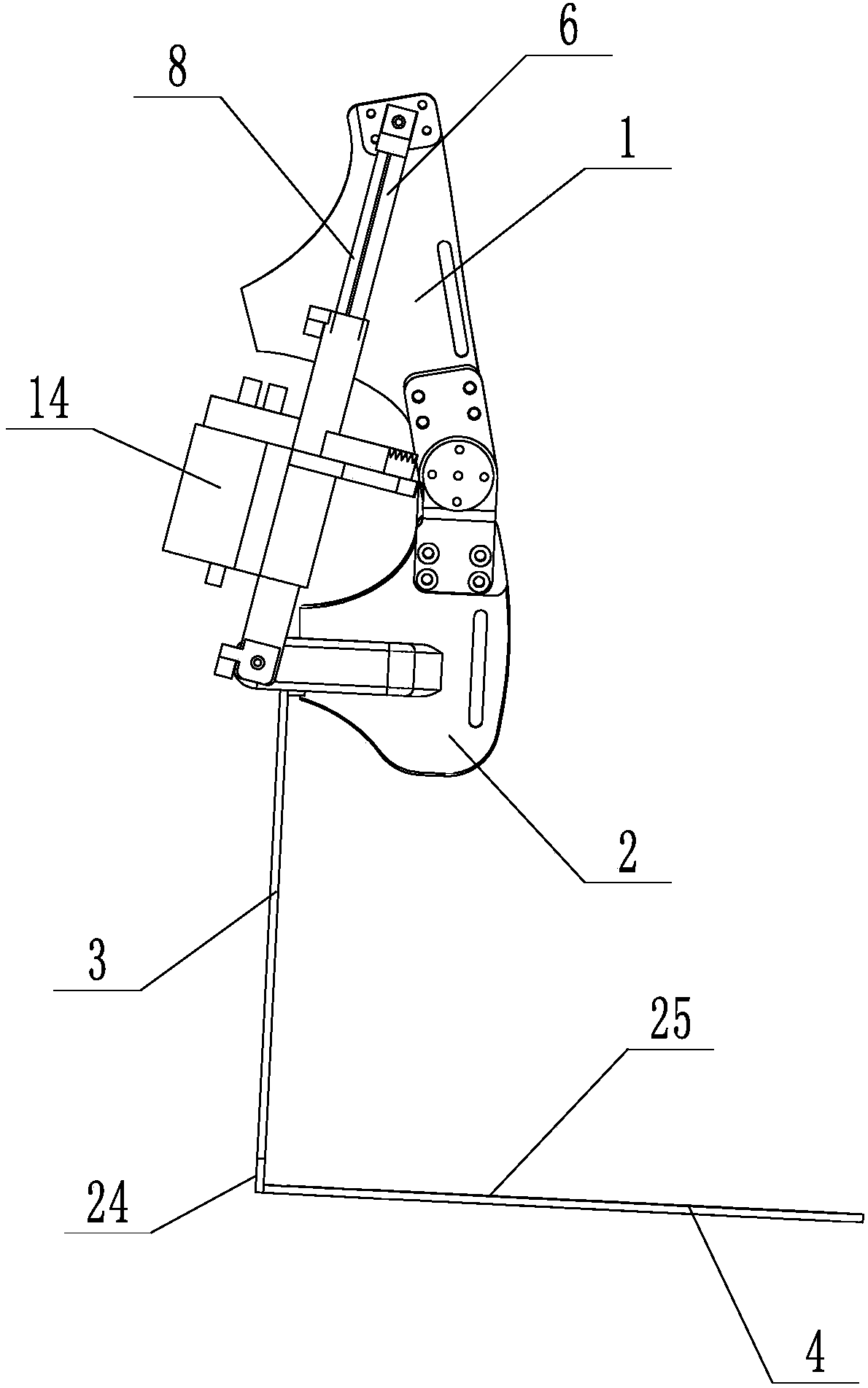
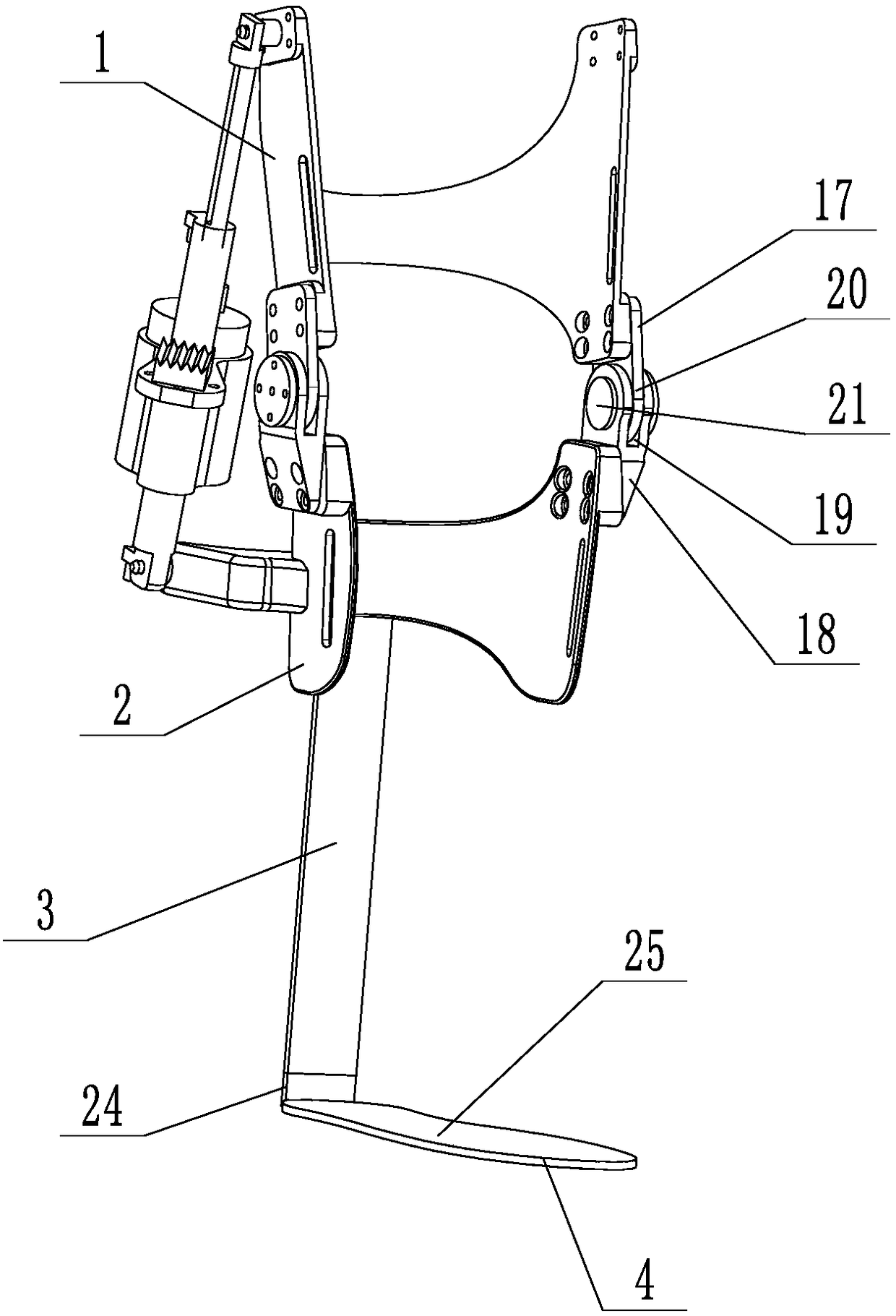
[0029] Such as figure 1 and Figure 4 As shown, a pumpless double push rod hydraulic walking robot, including a support mechanism, an adjustment mechanism and an oil supply pipeline;
[0030] The support mechanism includes a thigh shell 1, a calf shell 2, a connecting plate 3 and a sole plate 4, the thigh shell 1 is hinged to the calf shell 2, and the calf shell 2 is fixedly connected to the sole plate 4 through the connecting plate 3;
[0031] The adjustment mechanism is a hydraulic cylinder, and the two ends of the hydraulic cylinder are respectively hinged with the thigh shell 1 and the calf shell 2. The hydraulic cylinder includes a single-acting cylinder and a double-acting cylinder. The single-acting cylinder includes the first cylinder body 5, and the first cylinder Body 5 is movably connected to the first piston rod 6, the piston of the first piston rod 6 divides the chamber inside the first cylinder 5 into a top chamber 51 and a bottom chamber 52, and the double-acti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More