

Soft-body robot capable of autonomously balancing contact force
A robot and contact force technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as unbalanced contact force and damage to the operated object
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
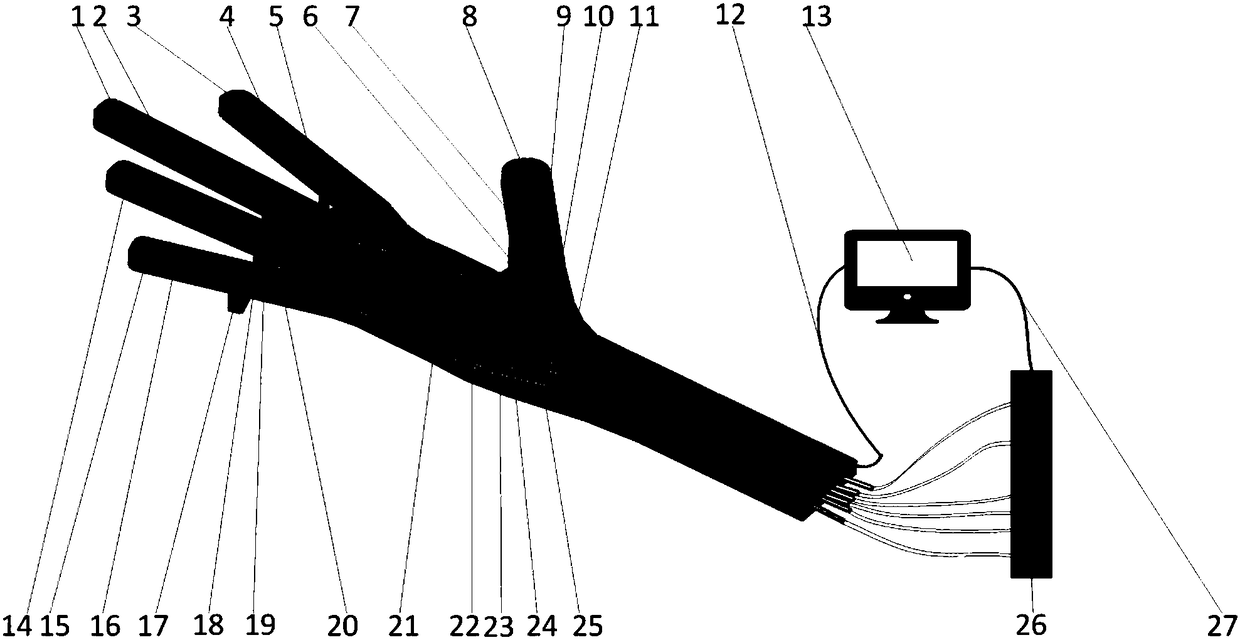
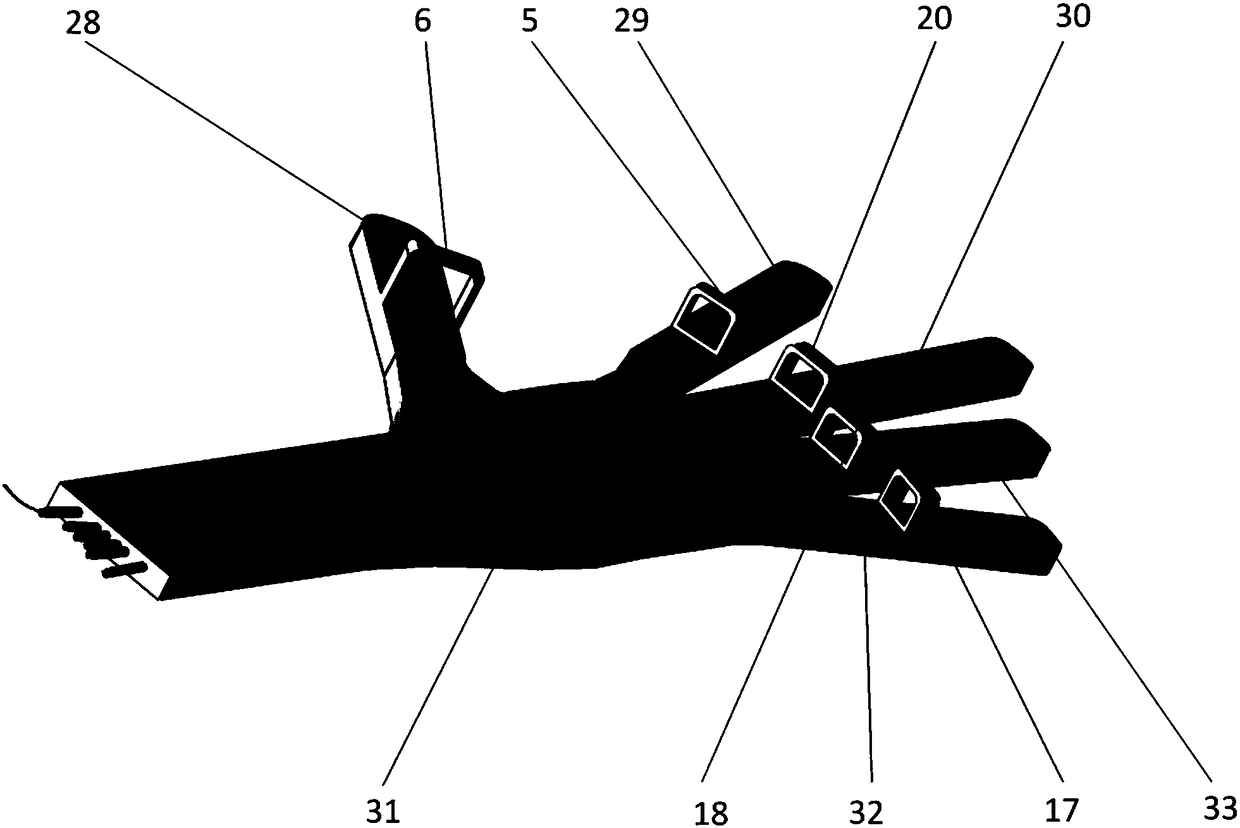
[0016] The present invention is a soft robot that can independently balance the contact force, including a force sensor 1, a soft finger cavity 2, a force sensor 3, a soft finger cavity 4, a fixed ring 5, a fixed ring 6, a soft finger cavity 7, and a force sensor 8 , soft air tube 9, soft air tube 10, soft air tube 11, wire 12, control system 13, force sensor 14, force sensor 15, soft finger cavity 16, fixed ring 17, fixed ring 18, soft finger cavity 19, fixed ring 20. Force sensor 21, soft palm cavity 22, soft air tube 23, soft air tube 24, soft air tube 25, air pump 26, wire 27, soft robot finger 28, soft robot finger 29, soft robot finger 30, hand module 31, The soft robot refers to 32 and the soft robot refers to 33 .
[0017] A soft robot capable of autonomously balancing contact force is composed of a hand module 31 , a control system 13 and an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More