

Positioning method and positioning system for mobile robot
A mobile robot and positioning method technology, applied in the field of robotics, can solve the problems of being easily affected by the environment, low positioning accuracy, and unable to provide distance information, etc., to achieve the effect of strengthening anti-interference ability and reducing requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
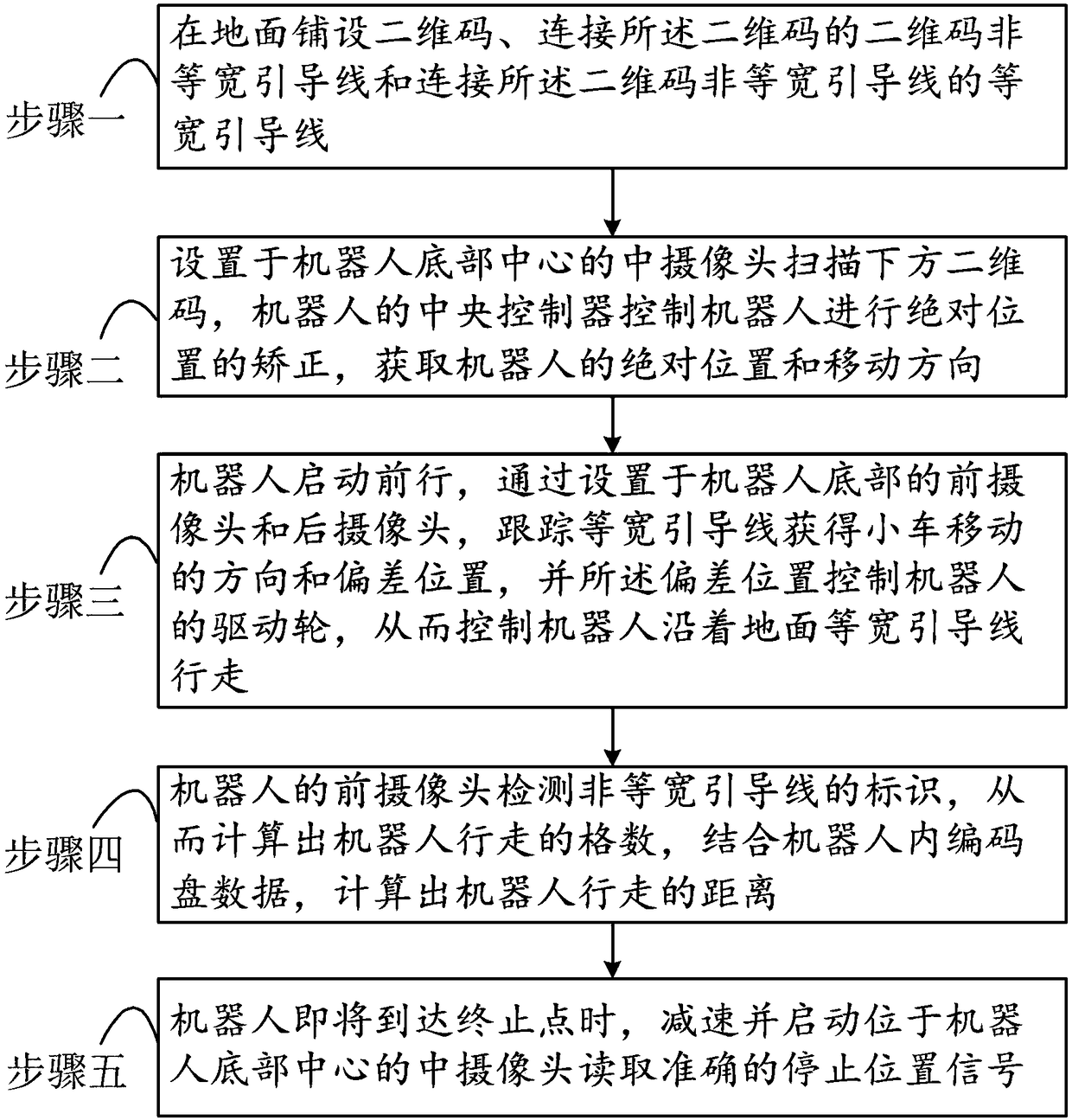
[0026] See figure 1 , the present invention is a mobile robot positioning method, comprising
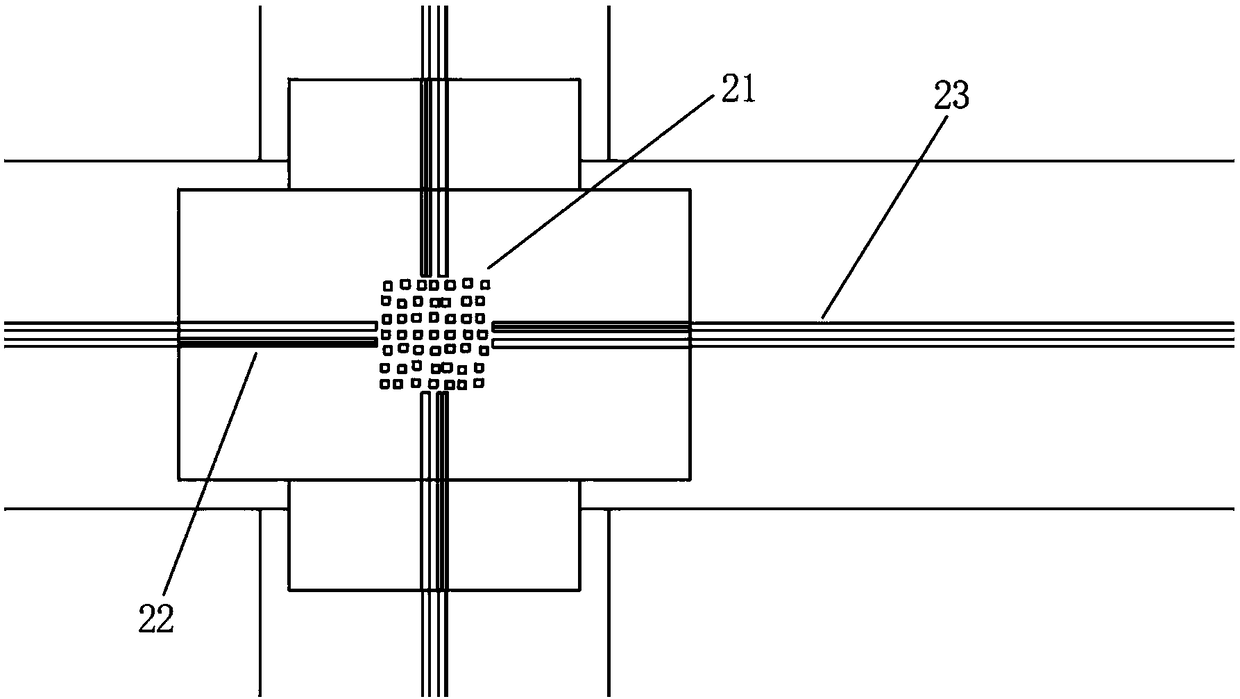
[0027] Step 1: laying two-dimensional codes on the ground, two-dimensional code non-equal-width guide lines connecting the two-dimensional codes, and equal-width guide lines connecting the two-dimensional code non-equal-width guide lines;
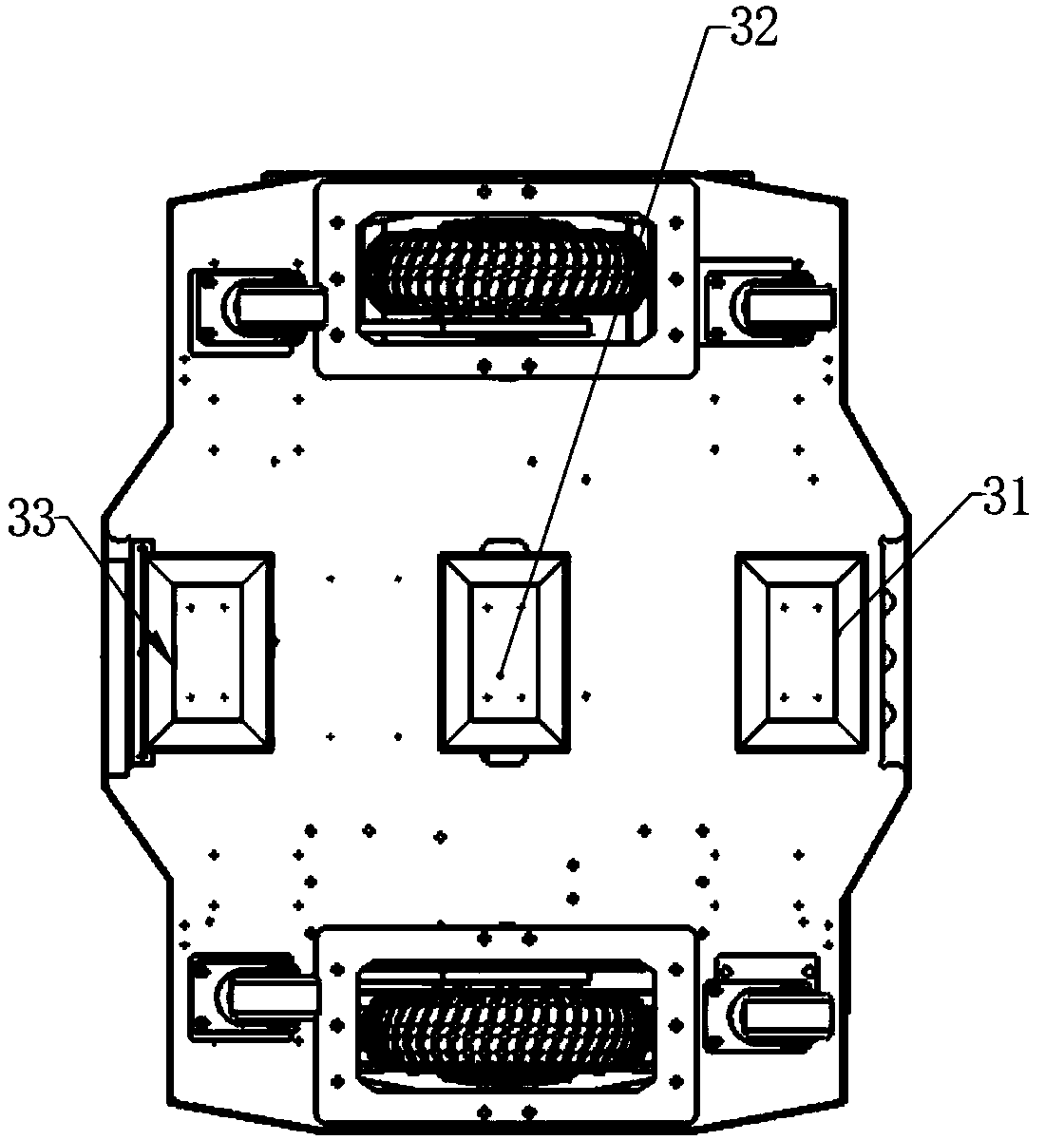
[0028] Step 2: The middle camera set at the center of the bottom of the robot scans the QR code below, and the central controller of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More