

Clustering control system and method for unmanned aerial vehicles
A swarm control, UAV technology, applied in the control/regulation system, non-electric variable control, three-dimensional position/channel control and other directions, can solve UAV damage, inconsistent UAV control rhythm and method, prone to collision And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
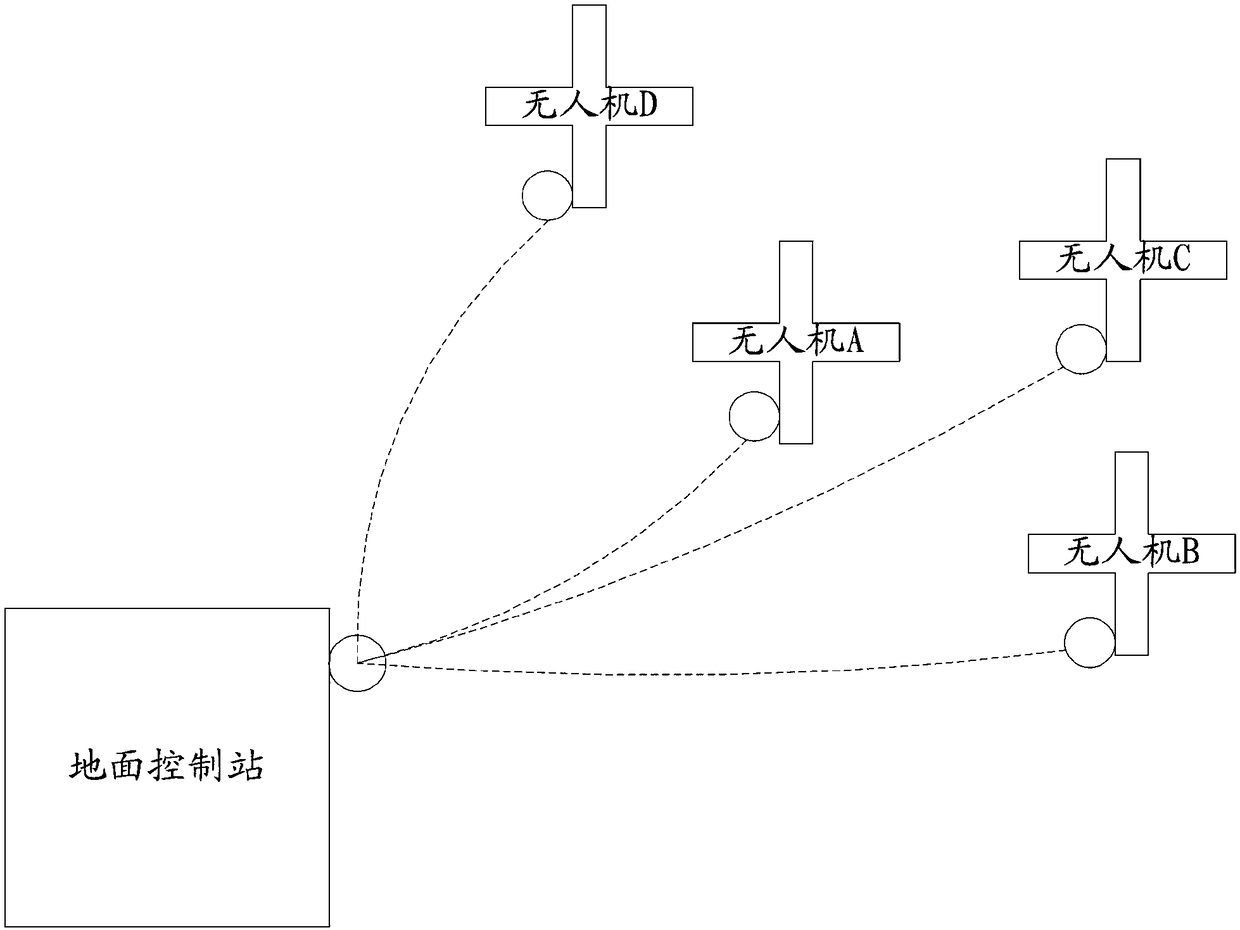
[0033] see figure 1 as shown, figure 1 It is a functional block diagram of the UAV swarm control system of the present invention. The invention provides an unmanned aerial vehicle cluster control system, which includes a ground control station and a plurality of unmanned aerial vehicles.
[0034] Wherein each drone is provided with a flight control module and a first wireless data transmission module, the first wireless data transmission module includes an antenna, an air radio frequency module, and a bus interface, the antenna is arranged above the air radio frequency module, and the bus interfa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More