

A parking recognition method based on spatio-temporal clustering
A recognition method and clustering algorithm technology, applied in character and pattern recognition, instruments, calculations, etc., can solve problems such as high degree of path overlap, point clusters are easily mistakenly merged into one category, and error parking is avoided, so as to avoid randomness , good generalization ability, and the effect of reducing merge errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment example
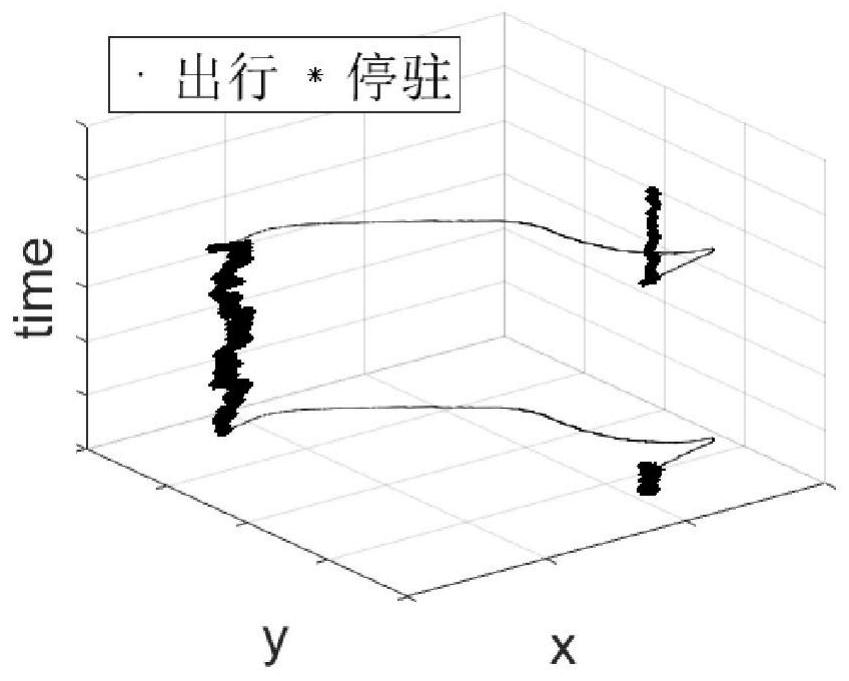
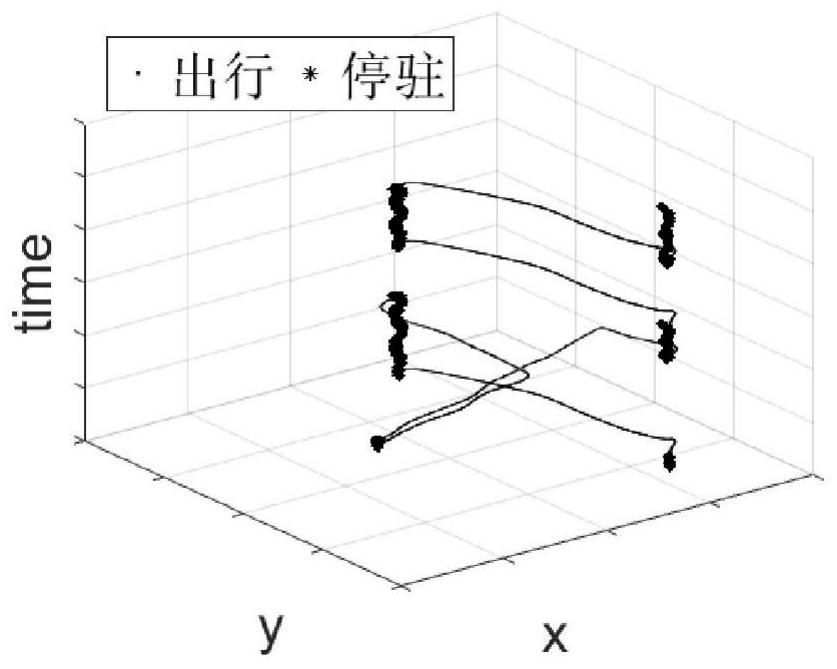
[0072] Select two full-day travel GPS trajectories collected by smart phones. Trajectory I is characterized by long parking time and relatively scattered points in space. The recording time is from 6:37:02 to 20:06:53, including 3 parking and 2 trips; Trajectory II is characterized by a large number of trips and a high degree of path overlap. The recording time is from 7:04:13 to 18:44:05, including 6 stops and 5 trips.
[0073] Setting parameters: search length k=61, temporal proximity threshold I=30s, spatial proximity threshold Eps=30m, minimum number of core point discrimination MinPts=30, minimum parking duration DU=120s.
[0074] Table 1 Travel log
[0075]
[0076]
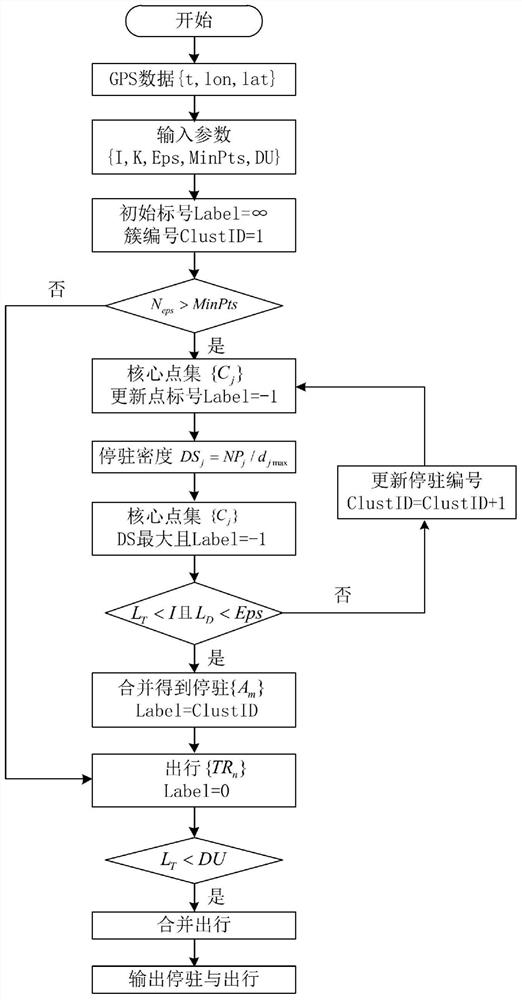
[0077] For the GPS trajectory data of the travel log in Table 1, according to figure 1 The flow chart of the parking recognition method based on spatio-temporal clustering of the present invention is shown, which processes and recognizes parking in trajectory I and trajectory II, and outputs the park...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More