

A control method for a suspended inspection robot
A technology for inspection robots and control methods, which is applied to mechanical equipment, transmission devices, friction transmission devices, etc., can solve the problems of large demand for robots and obstacles to free switching of inspection modes, and achieve the effect of universal use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
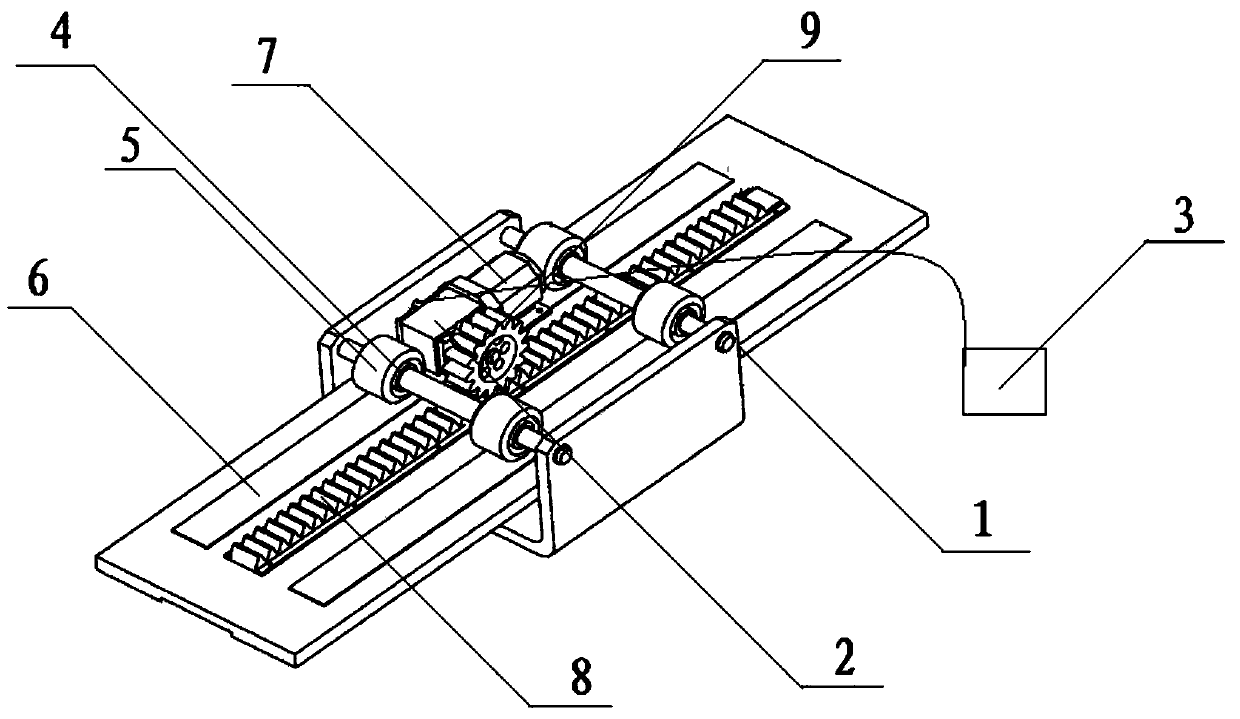
[0015] figure 1 It is a flow chart of the control method of the present invention. The present invention proposes a suspended inspection robot control system, which is applied to a suspended inspection robot 1, including a processor, a remote control transmitter 3, a remote control receiver 2, and a walking sensor 4, the processor, the walking sensor 4 and the remote control receiver 2 are installed on the suspended inspection robot 1, the processor is connected to the remote control receiver 2 and the walking sensor 4 respectively, and the remote control transmitter 3 is connected to the walking sensor 4. The remote control receiver 2 is connected in communication, and the suspended inspectio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More