Walk climbing vehicle and detection robot based on the same
A technology of climbing walls and walking vehicles, applied in the field of robots, can solve the problems of limited adsorption force, poor safety, and difficulty in realization, and achieve the effects of improving the adsorption force of vacuum negative pressure, operating stably and safely, and increasing the adsorption area.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Apparently, the described embodiments are some of the embodiments of the present invention, but not all of them.
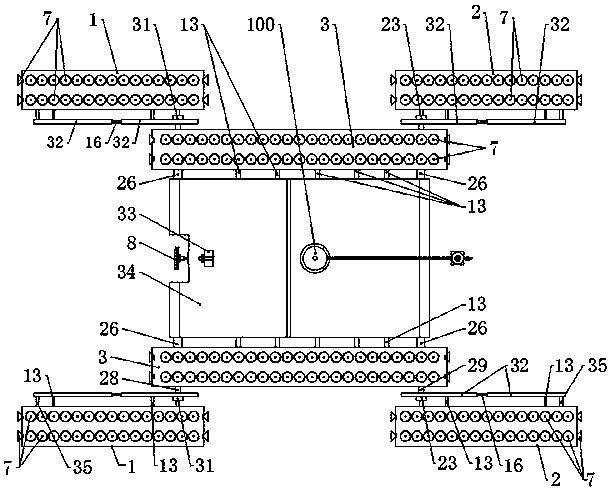
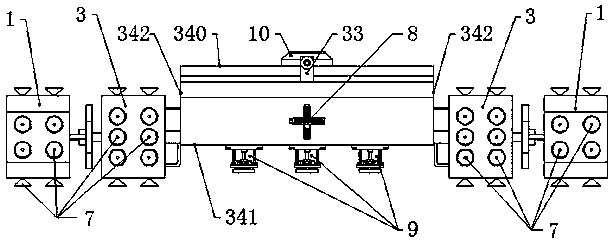
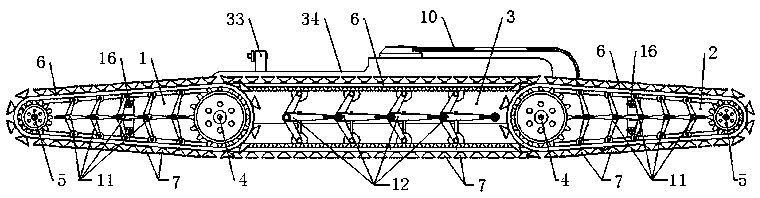
[0035] A climbing car, such as figure 1 and figure 2 As shown, the device includes a trolley 34 and two crawler belt systems symmetrically installed on opposite sides of the trolley 34. The trolley 34 includes a bottom plate 341, a top plate 340 opposite to the bottom plate 341, and a top plate 340 for sealing and connecting the bottom plate 341 and the top plate. A plurality of side plates 342 on the side of the 340, a driving device that provides power to the two crawler belt systems is provided in the trolley 34. Wherein, each crawler system includes a front crawler device 1, a rear crawler device 2 and a middle crawler device 3, and the middle crawler device 3 is arranged on the outer side of the trolley 34, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com