Multi-motion mode four-leg robot
A quadruped robot and multi-motion mode technology, applied in the field of robotics, can solve problems such as unrealistic, reduced robot adaptability, and complex design of walking robots, and achieve the effects of easy production, simple structure, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
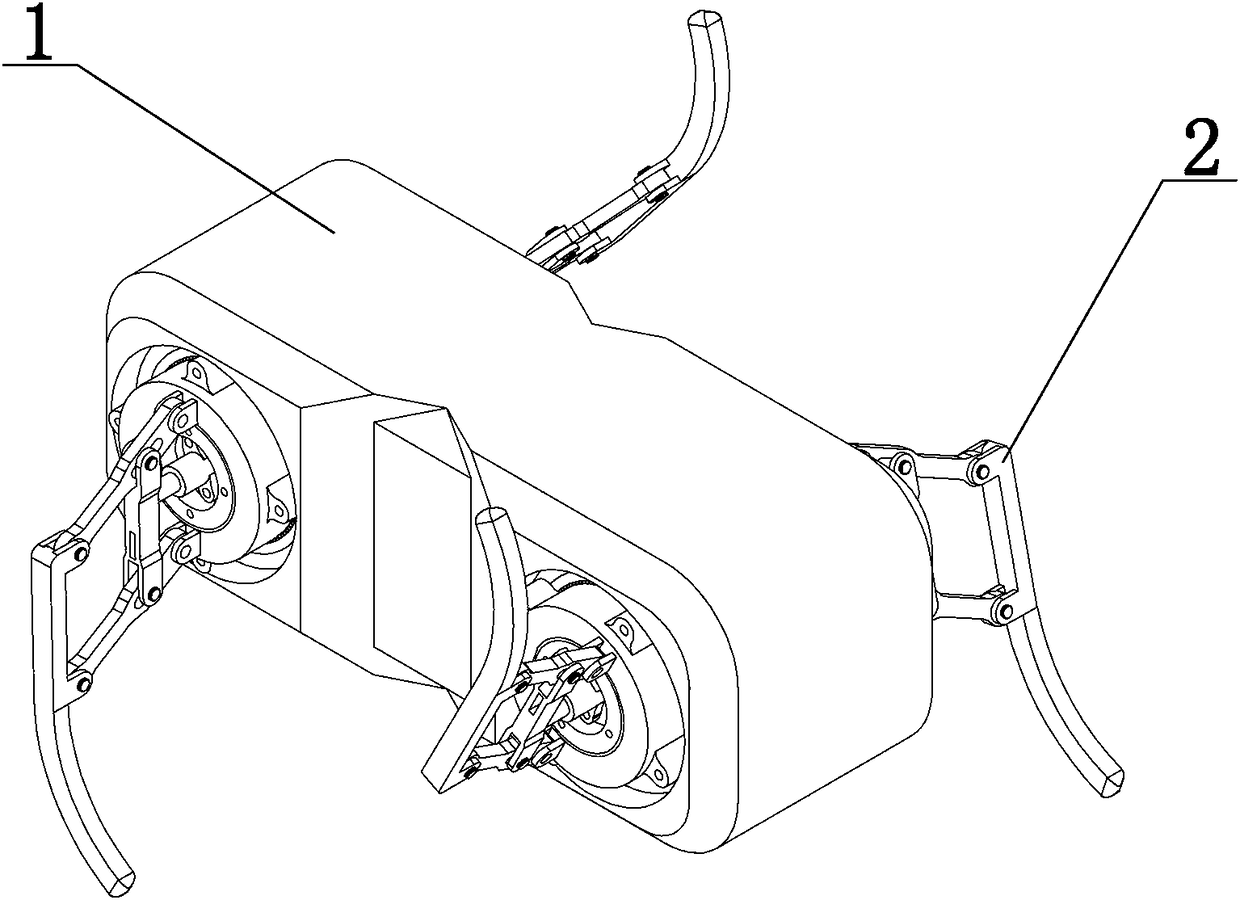
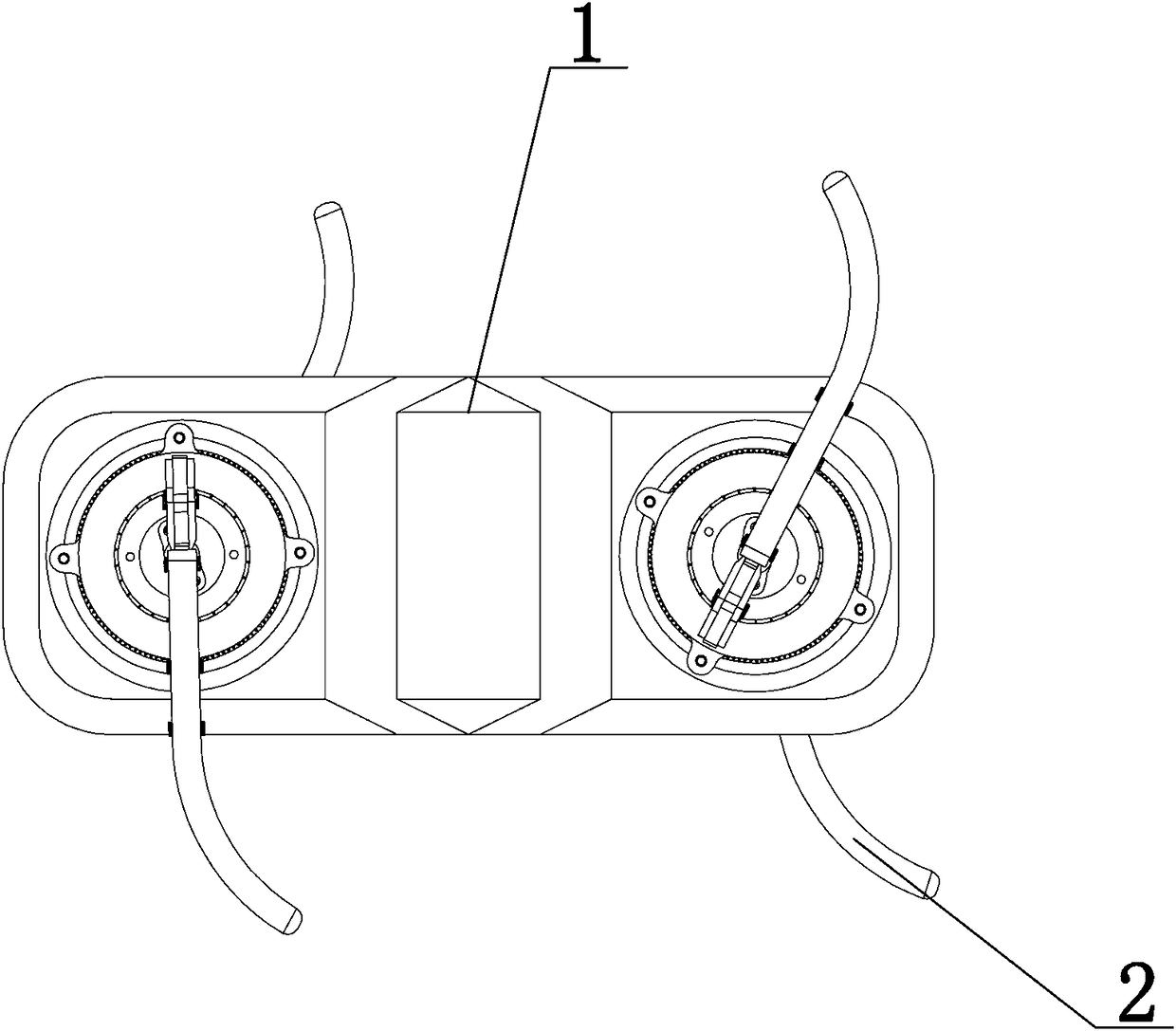
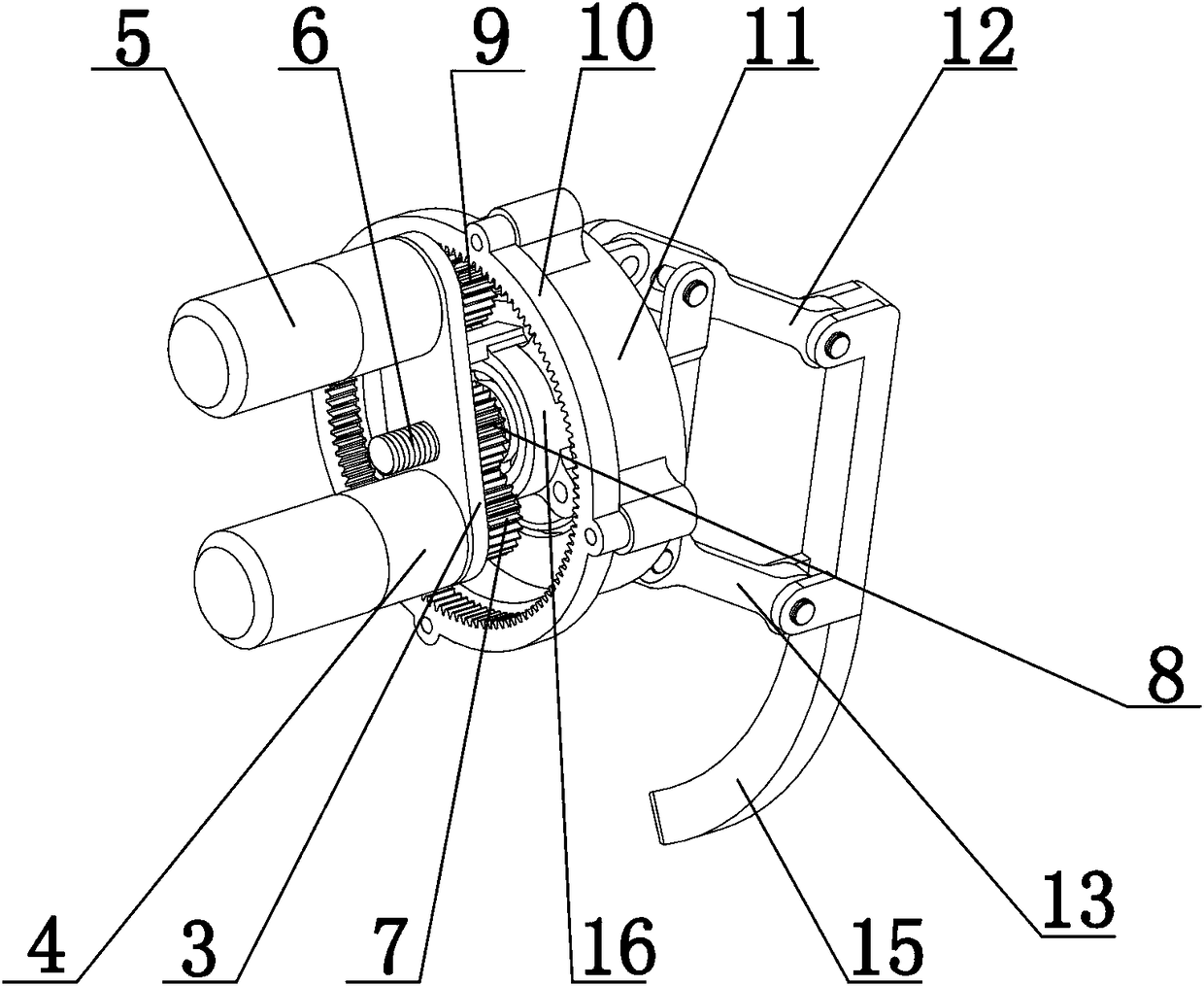
[0031] Such as Figure 1~Figure 7 As shown, a quadruped robot with multiple motion modes includes a casing 1, the casing 1 is hollow, and the left and right sides of the casing 1 are symmetrically fixed with four legs with the same structure by four motor brackets 3 The internal motion assembly 2, that is, the left front leg motion assembly, the right front leg motion assembly, the left rear leg motion assembly and the right rear leg motion assembly; Holes matching the shape of the motor bracket 3 are provided on both sides, and the motor bracket 3 is fixed in the hole; the leg movement assembly 2 includes a leg lifting system, a rotation system and a leg linkage assembly to realize the walking motion mode of the quadruped robot Or rotation motion mode, described leg raising system comprises leg raising motor 4, leg raising driving gear 7, leg raising follower gear 8, inner belt seat outer spherical bearing 16 and linear bearing 17, and described rotating system includes rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com