

AGV shortest path planning method and device and computer-readable storage medium
A technology of the shortest path and path, which is applied in the field of AGV, can solve problems such as computational complexity, and achieve the effect of low complexity, fast speed, and simple calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
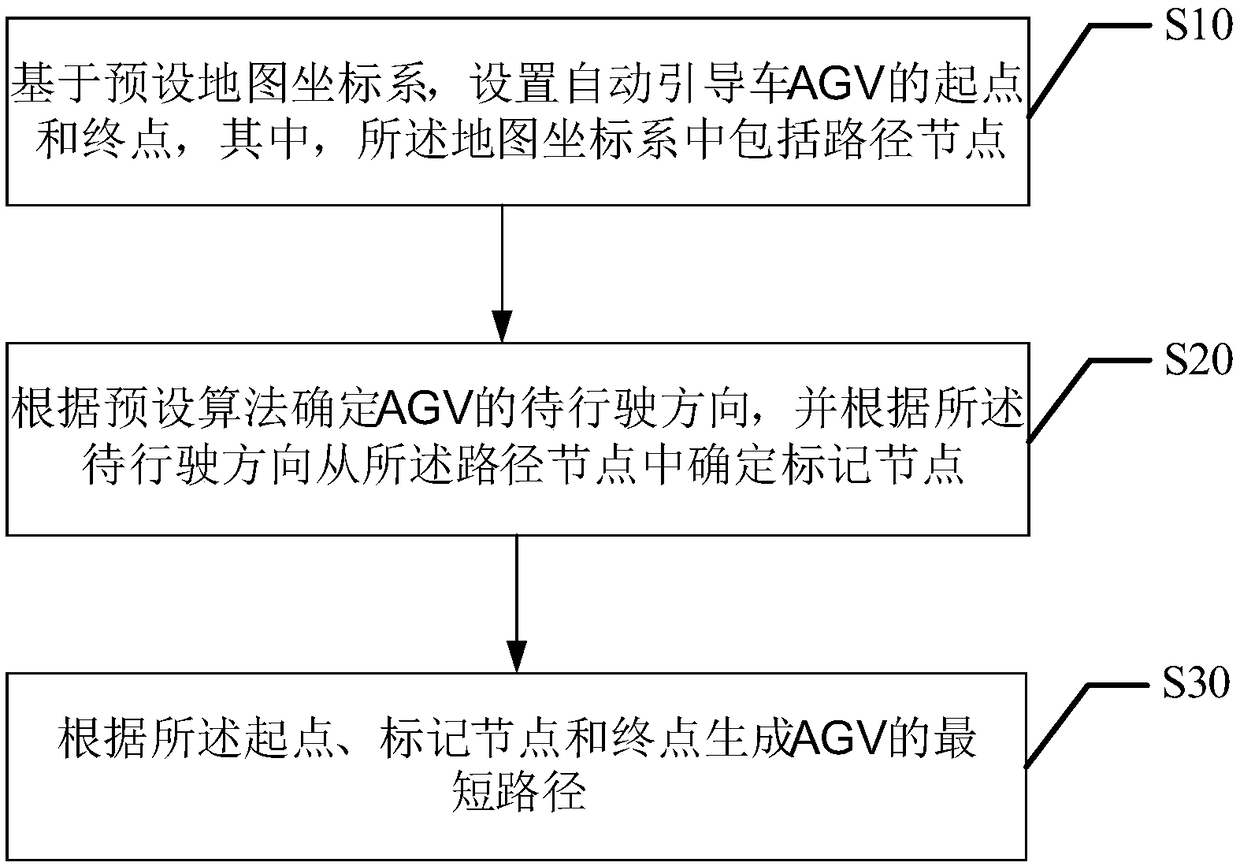
[0044] The main solution of the embodiment of the present invention is: based on the preset map coordinate system, set the starting point and the end point of the automatic guided vehicle AGV, wherein, the map coordinate system includes path nodes; determine the direction to be driven of the AGV according to the preset algorithm, And determine the marked node from the path nodes according to the direction to be driven; generate the shortest path of the AGV according to the starting point, marked node and end point.
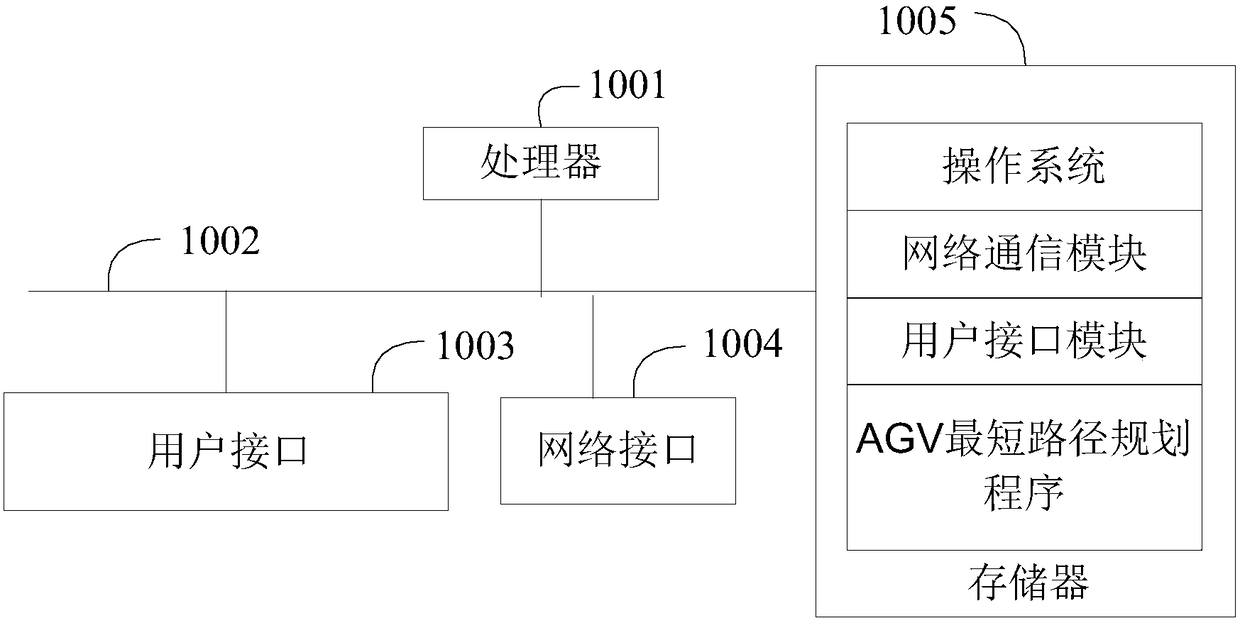
[0045] Such as figure 1 as shown, figure 1 It is a schematic diagram of the structure of the terminal to which the device of the hardware operating environment involved in the solution of the embodiment of the present invention belongs.
[0046] The terminal of the embodiment of the present invention be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More