Wheel-legged robot with multiple walking modes
A walking mode and robot technology, applied in the field of robotics, can solve problems such as poor adaptability to changing environments, complex joint coordination control, single walking mode, etc., and achieve the effects of good adaptability to complex terrain, superior mobility, and flexible control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings, but the present invention is not limited to the scope of the described embodiments.
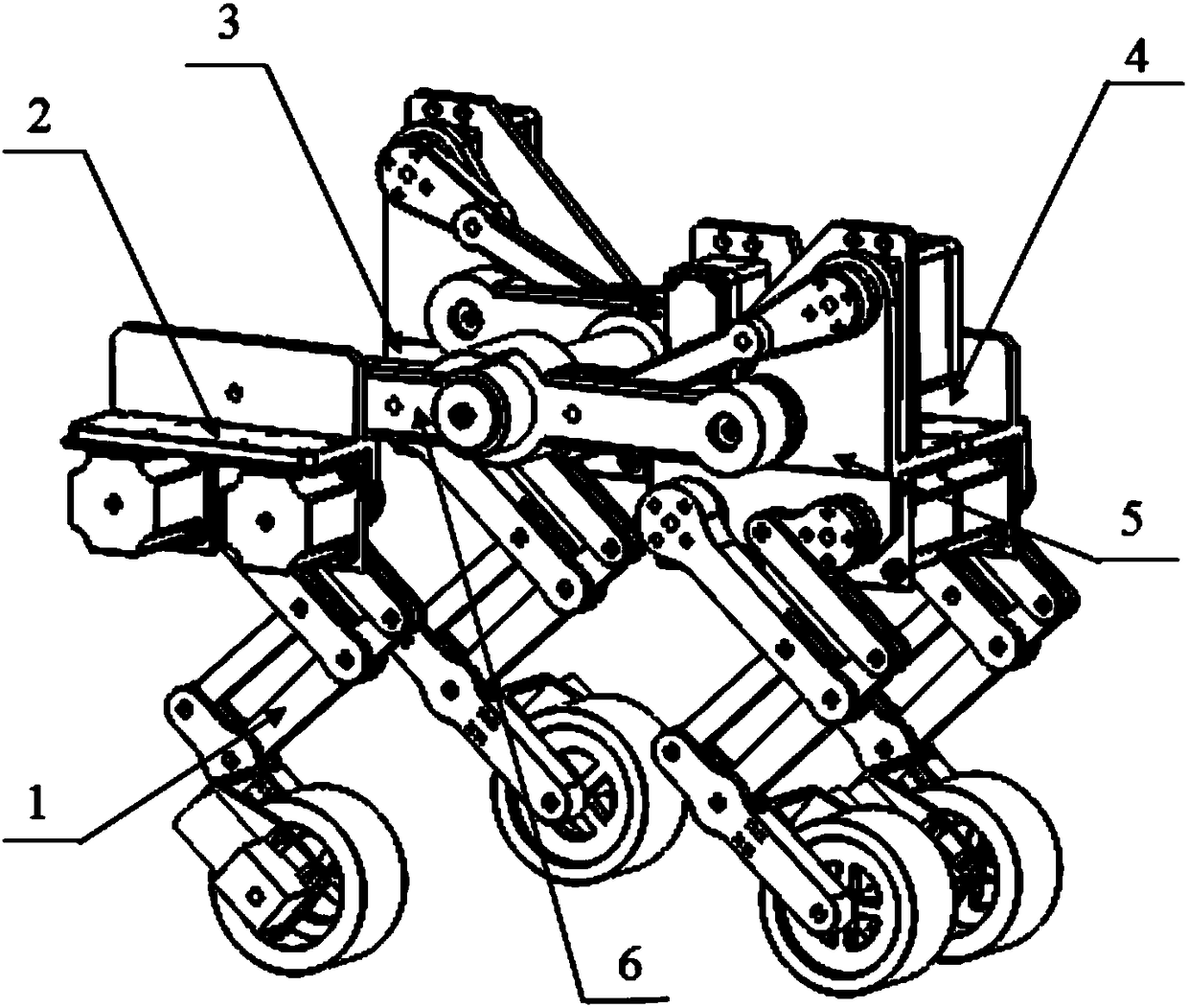
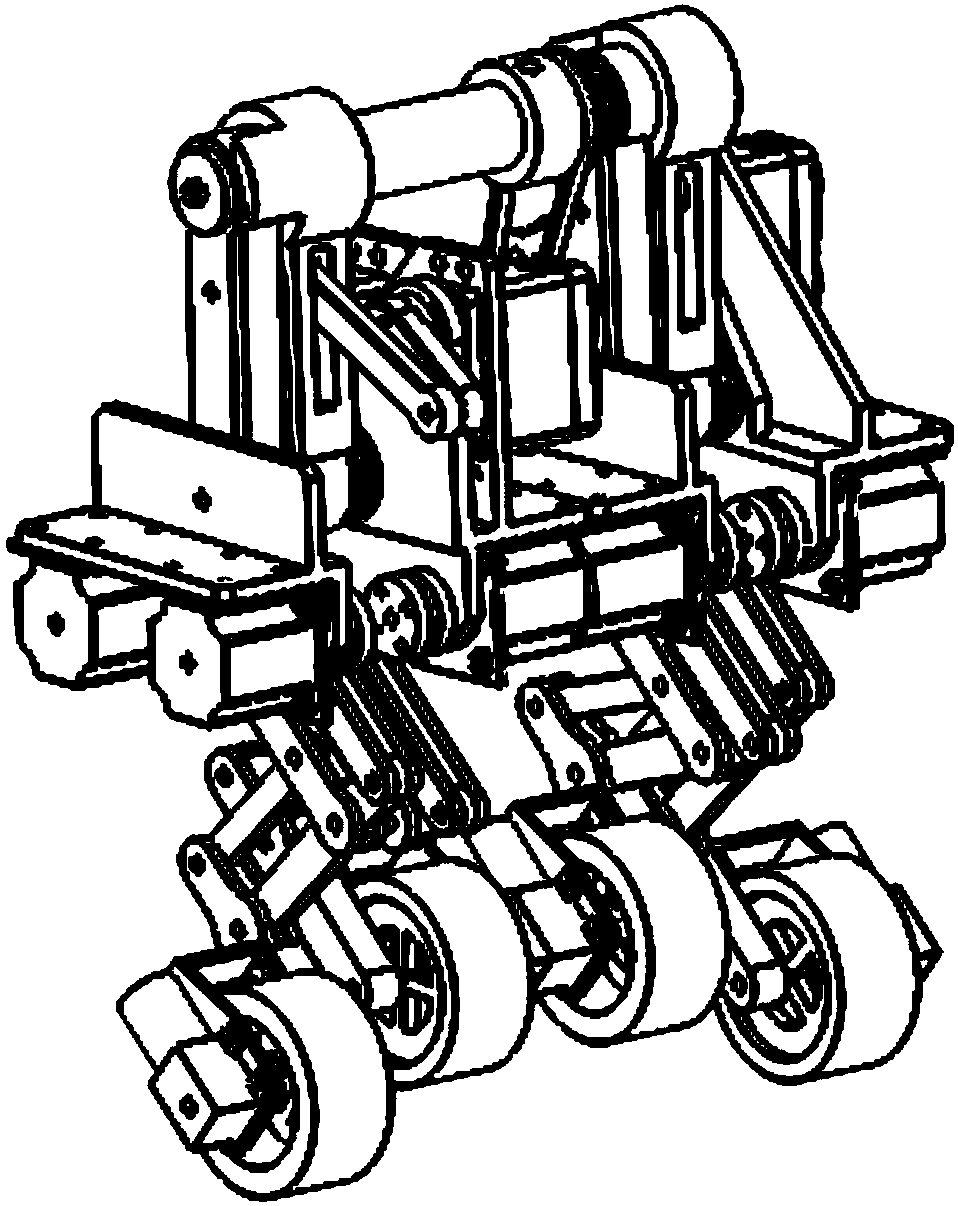
[0030] see figure 1 , figure 2, a multi-walking wheel-legged robot, including four wheel-leg devices distributed front, rear, left, and right, the four wheel-leg devices are left rear wheel-leg device, left front wheel-leg device, right front wheel-leg device, right rear wheel The leg device, the four-wheel leg device is connected on the same fuselage 6; the wheel leg device is hinged with the fuselage 6, and the wheel leg devices on both sides are arranged symmetrically, and there is a space between the two wheel leg devices at the rear to accommodate the front two wheel leg devices. The space of the device; the fuselage 6 is a foldable electric drive folding structure, so as to reduce the wheelbase between the front and rear wheel legs through the shrinkage of the fuselage 6; the fu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com