

A method for dynamic ad hoc networking of vehicle networking
An ad-hoc network and Internet of Vehicles technology, which is applied in the traffic control system of road vehicles, network topology, vehicle components, etc., can solve problems affecting system stability, misjudgment of scene recognition, and large number of connected nodes, etc., to improve the system Stability issues, enhanced management, beneficial effects for identification and early warning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0025] See attached Figure 1-3 , a method for dynamic ad hoc networking of the Internet of Vehicles, characterized in that: comprising the following steps:
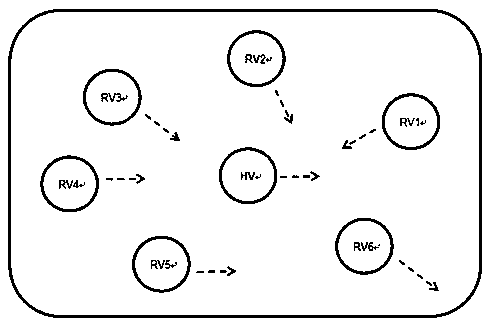
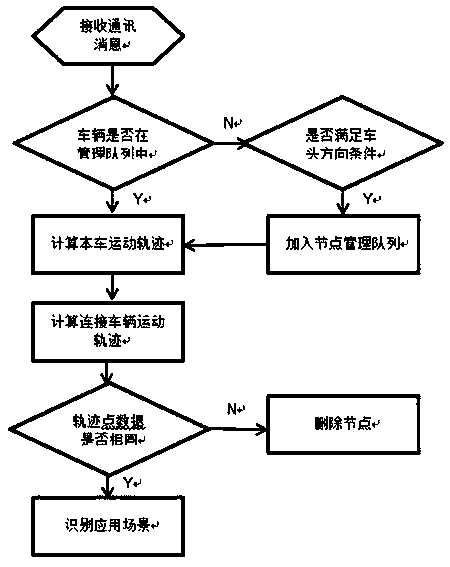
[0026] S1. The own vehicle (HV) receives the communication message from the nearby connected vehicle (RV);
[0027] S2. Determine whether the connected vehicle (RV) is in the management queue. If the connected vehicle (RV) is in the management queue, continue to calculate the own vehicle (HV) trajectory. If the connected vehicle (RV) is not in the management queue, then judge the connection Whether the vehicle (RV) meets the head direction condition, if the connected vehicle (RV) meets the head direction condition, add the vehicle to the node management queue, and then calculate the own vehicle (HV) trajectory;
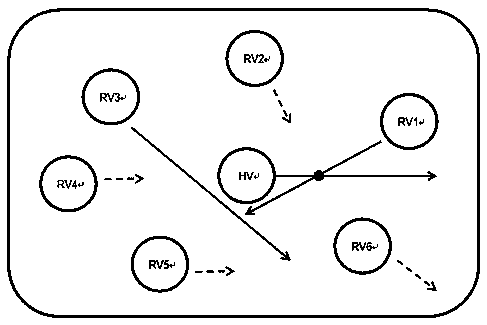
[0028] S3. After completing the calculation of the trajectory of the own vehicle (HV), continue to calculate the trajectory of the connected vehicle (RV);
[0029] S4. If the trajectory point data of the traje...
Embodiment 2
[0031] This embodiment is similar to Embodiment 1. Further, the method for judging whether the head direction condition is satisfied is as follows: take the own vehicle (HV) as the center, and filter out the vehicles whose head direction points to the center according to the head direction information of the connected vehicle (RV), Added to the node management queue and with velocity direction model P i (v, h) represents, where i represents the serial number of the connected node, V represents the speed of the connected vehicle, and h represents the head direction of the connected vehicle. Such as figure 1 As shown, the vehicles that meet the networking conditions are RV1, RV2, RV3, and RV4.
[0032] The method of calculating the trajectory of the vehicle is to calculate the trajectory points of the vehicle (HV) based on the position information, speed, direction of the vehicle head and body information of the vehicle (HV), and use the time position model MH j (t, x, y) is s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More