

High anti-interference adaptive path following method and system
A self-adaptive, path technology, applied in the control/regulation system, vehicle position/route/height control, non-electric variable control and other directions, can solve the problem of water flow interference, etc., to eliminate water flow interference, resist water flow interference, reduce The effect of tracking error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Ships in the present invention refer to various underwater navigation equipment in a broad sense, such as underwater robots, underwater submarines, unmanned surface ships, surface ships, etc. The above-mentioned various underwater navigation equipment are all within the scope of application of the present invention. The present invention will be described in more detail below with reference to the accompanying drawings.
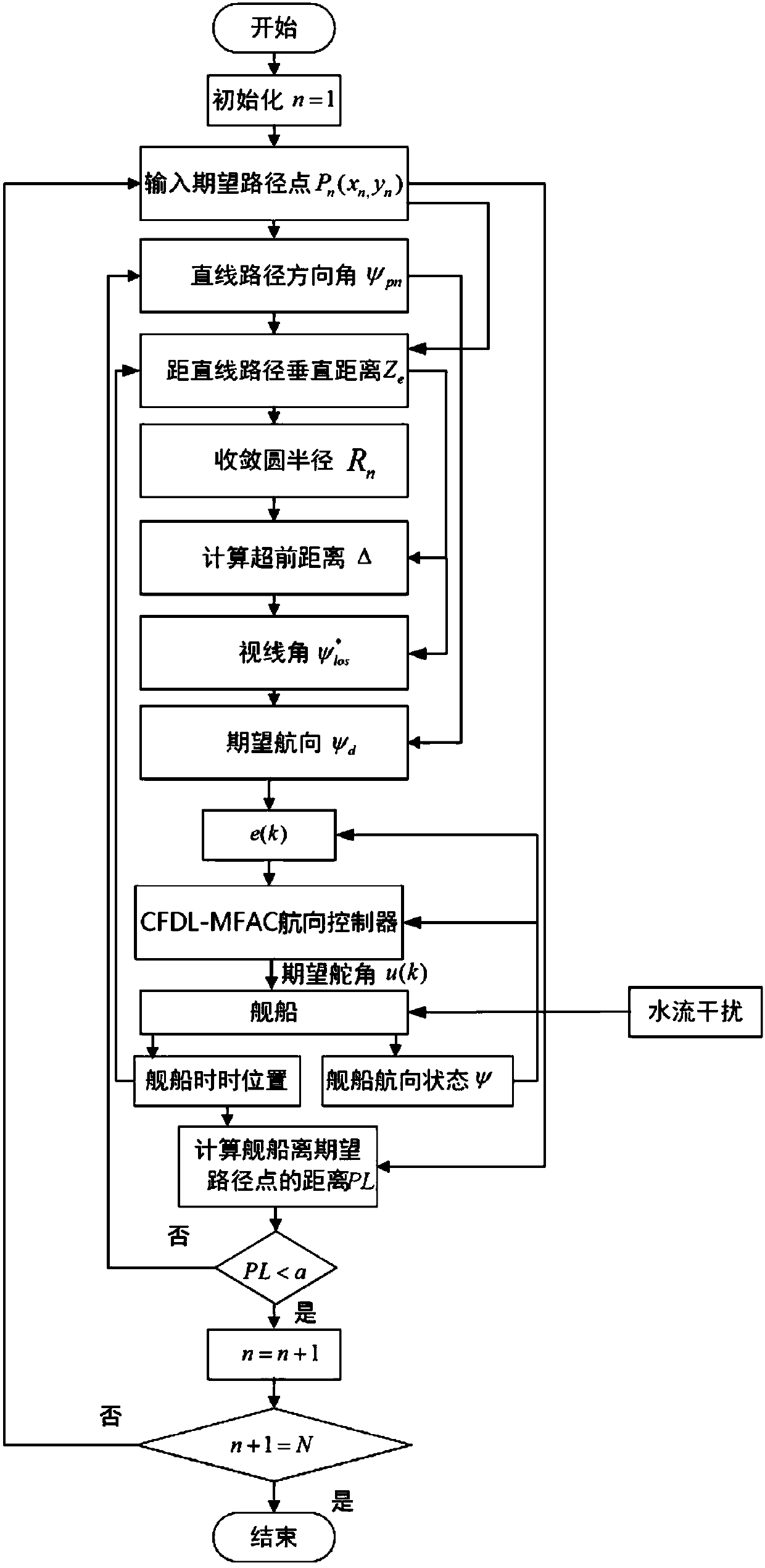
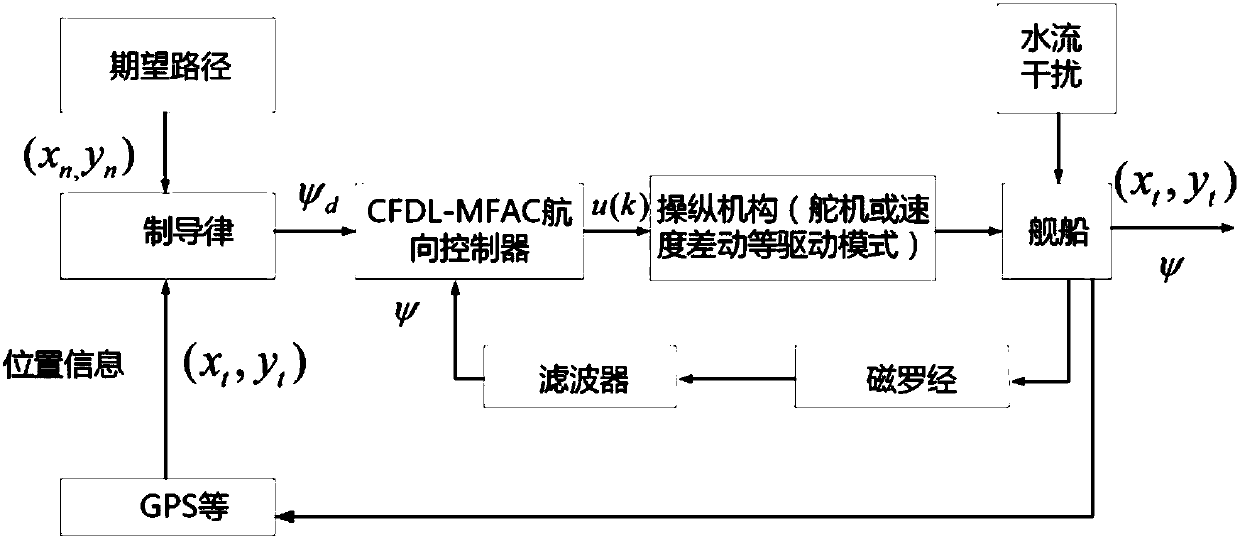
[0036]The invention is mainly aimed at the tracking of the straight line path of the ship under the influence of the uncertain current. The main steps include: (1) Input the desired path command, the desired path consists of N desired path points, and the desired path point P=(P 1 ,P 2 ,P 3 …P n )N≥2, where P n =(x n ,y n ), represents the coordinates of the nth desired path point, 1≤nn =(x n ,y n ) and P n+1 =(x n+1 ,y n+1 ) to obtain a straight line path connecting two points, and obtain the direction angle of the straight line path ψ pn ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More