

Robot intelligent idea control method based on modal migration complex network
A technology of robot intelligence and complex network, which is applied in the field of robot intelligent idea control based on modal transfer complex network, and achieves the effects of high recognition and control accuracy, improved classification accuracy, and rich directional targets.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The robot intelligent idea control method based on the modal transition complex network of the present invention will be described in detail below with reference to the embodiments and the accompanying drawings.
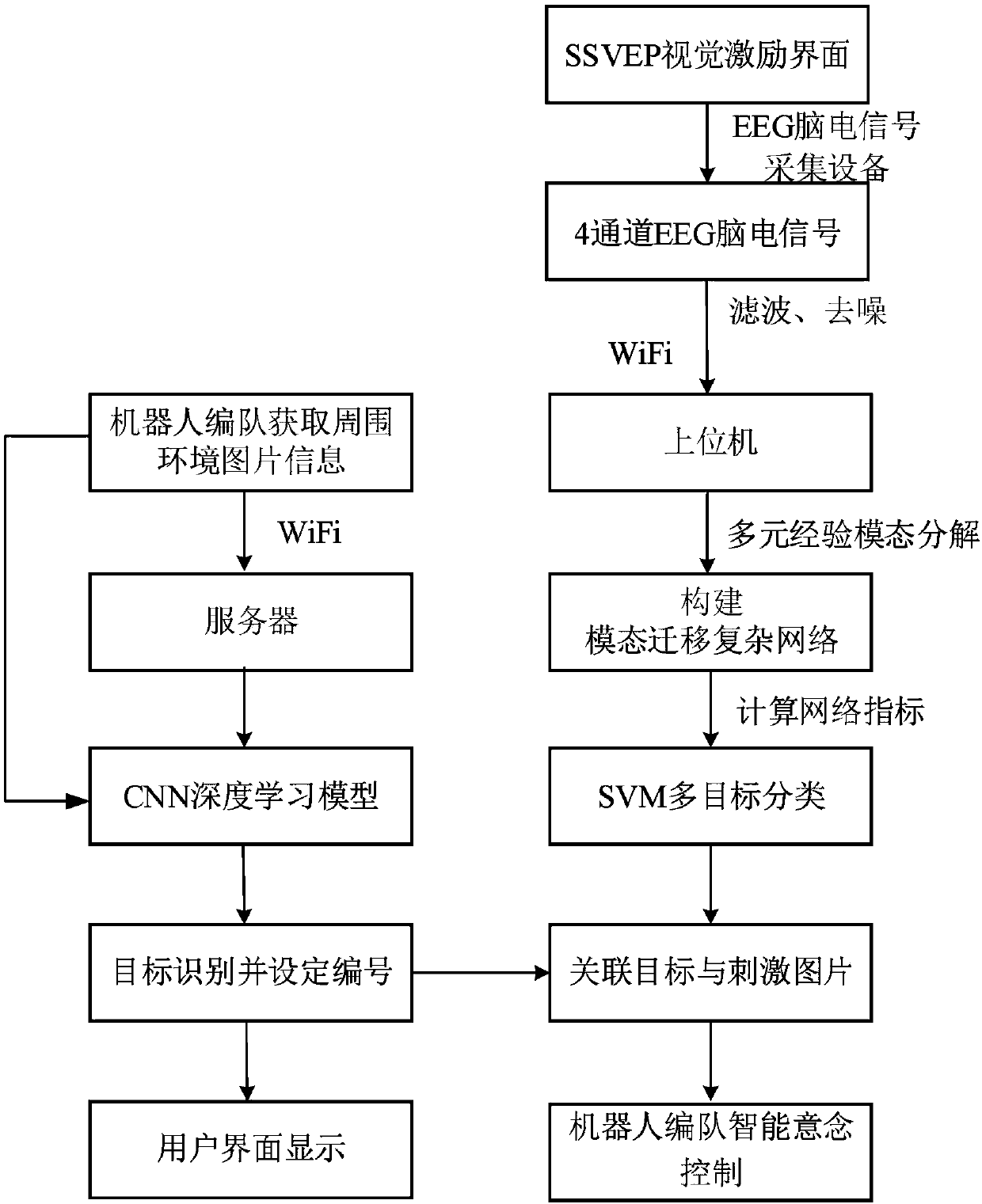
[0040] The robot intelligent idea control method based on the mode transfer complex network of the present invention, the flow chart is as follows figure 1 shown, including the following steps:
[0041] 1) Obtain the surrounding environment information through the image acquisition equipment carried by the robot, combined with deep learning theory, so that the robot has the target recognition function; including:
[0042] (1) The robot collects the picture information of the surrounding environment from different angles respectively. The robot is a robot or a robot formation that can realize cooperative operation. For example, a group of four robots are used to move cooperatively in a rhombus shape, and the front, rear, left, and right sides are collected resp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More