

Surgical robot system and surgical instrument thereof
A technology for surgical instruments and instrument rods, which is applied in the field of surgical robot systems and surgical instruments, and can solve the problems of low contact force measurement accuracy and high scrapping rate of sensors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] In order to make the purpose, advantages and features of the present invention clearer, the following is attached Figure 1~8 The surgical robot system and surgical instruments proposed by the present invention will be further described in detail. It should be noted that the drawings are in a very simplified form and all use imprecise proportions, which are only used to conveniently and clearly assist in explaining the purpose of the embodiments of the present invention. As mentioned in the specification, "end" and "distal" refer to the end far away from the product operator, and "proximal end" refers to the end close to the product operator.
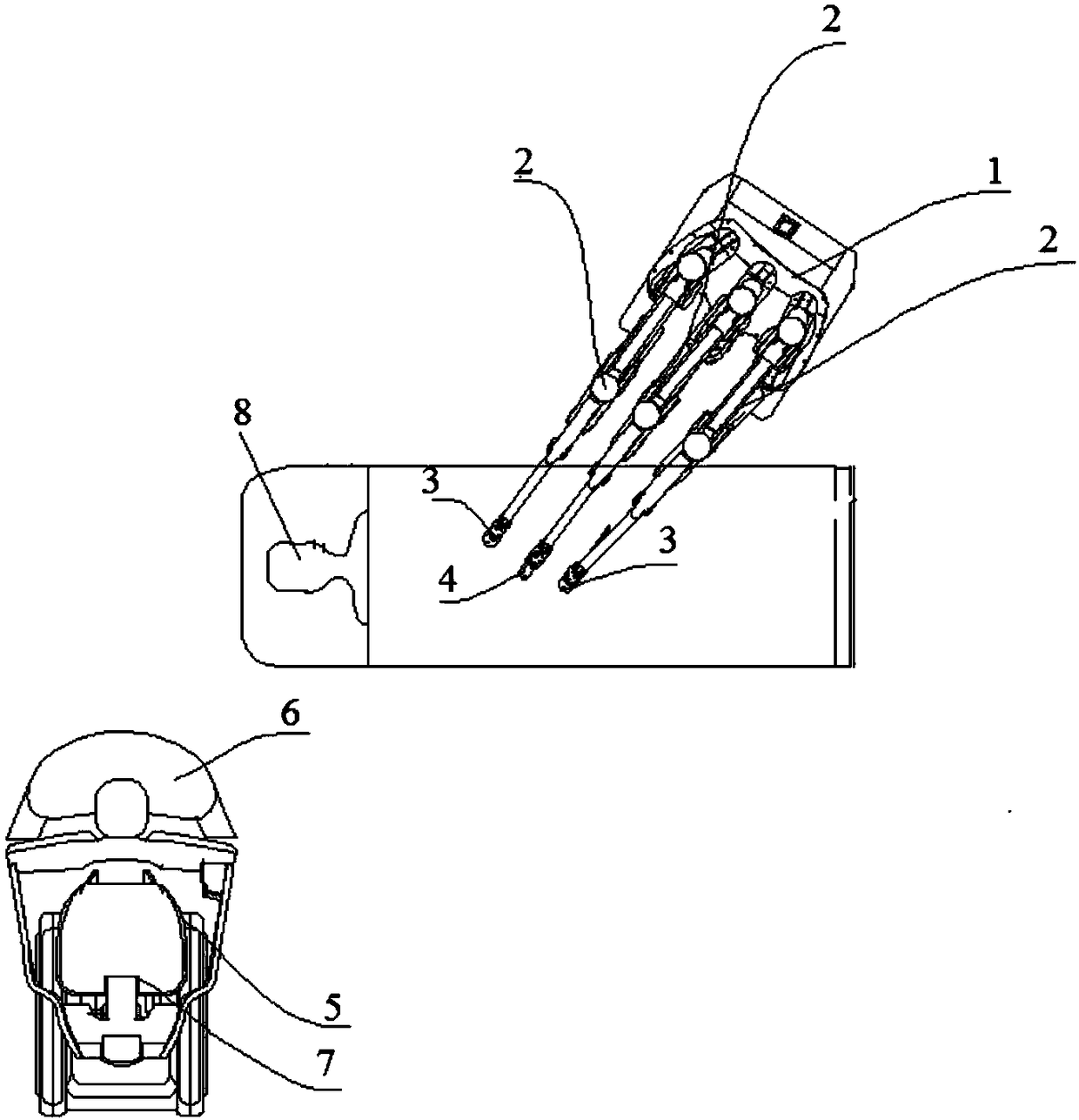
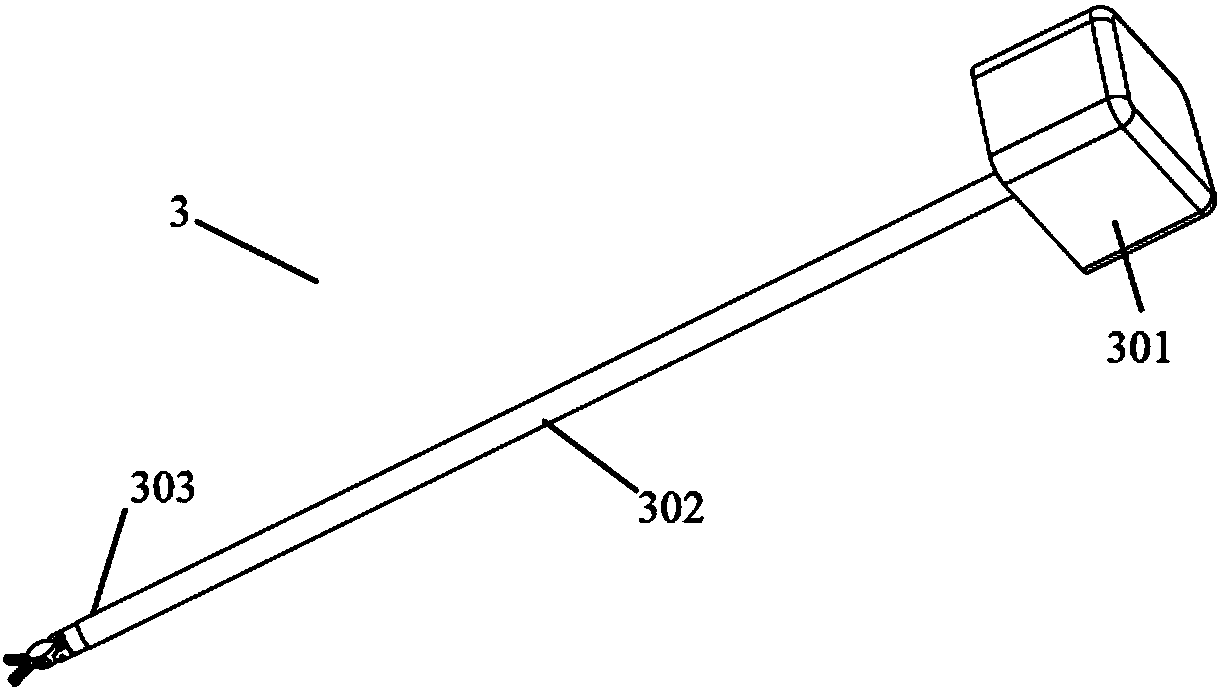
[0089] figure 1 It is a schematic diagram of the structure of the slave device of the surgical robot system according to an embodiment of the present invention. Such as figure 1 As shown, the slave-end equipment includes an operating trolley 1, a mechanical arm 2, a surgical instrument 3, and an endoscope 4. The operating trolley...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More