

Method and system for predicting intersection vehicle collision risk based on vehicle and road synergy
A technology for vehicle collision and risk prediction, applied in the field of automobile control, can solve problems such as collision accidents, complex driving safety problems, and increased road traffic burden, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
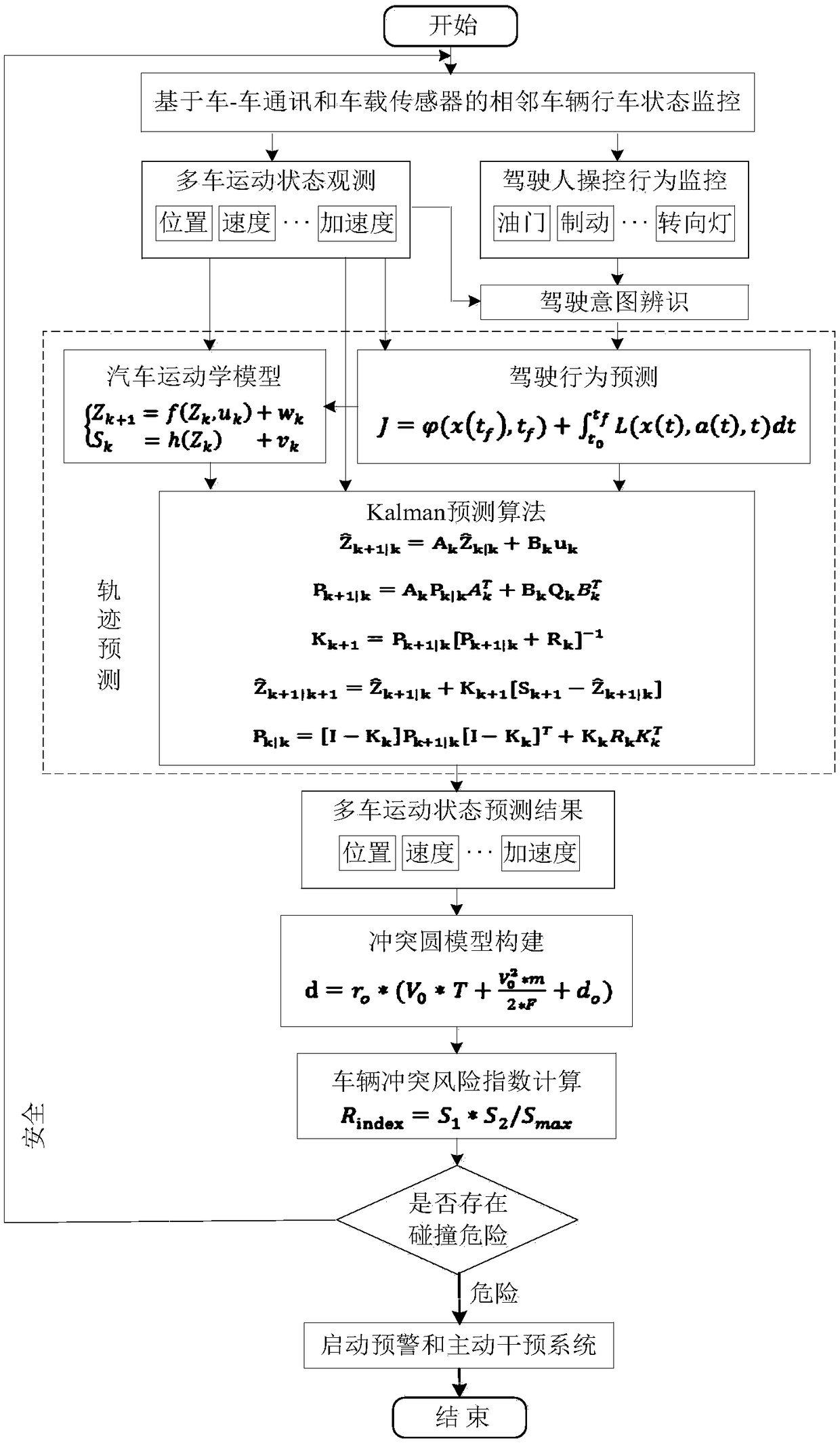
[0047] Combine below figure 1 The specific method of this embodiment is introduced. As shown in the figure, the new method for vehicle collision risk prediction at intersections based on vehicle-road coordination in this embodiment specifically includes the following steps:
[0048] Step 1: Collect the motion state information (position, speed, acceleration, heading angle, etc.) of the neighboring vehicles and the driver's control information (accelerator pedal, brake pedal and turn signal signal) through the vehicle-mounted multi-sensor device and V2X communication technology DSRC , Through the comprehensive perception of the above information to identify the driver’s driving intention, such as Figure 4 Shown
[0049] Step 2: Combine the vehicle motion state information, road obstacle information and the driver's driving intention information, and predict the driver's manipulation behavior based on the utility function that reflects the driving behavior decision based on the qu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More