

Underactuation vacuum chuck paw having multiple grabbing modes
A vacuum suction cup and underactuated technology, which is applied in the field of robot grippers, can solve problems such as single function, small grasping force, and high friction, and achieve the goal of expanding the size range, improving the ability to grasp loads, and reducing modeling requirements. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0019] The preferred embodiment of the underactuated vacuum chuck gripper with multiple grabbing modes of the present invention is:
[0020] Includes multiple fingers, substrate, motor and air pump;
[0021] The finger includes an elastic plate, the elastic plate is equipped with at least 5 hard phalanges, the hard phalanx is covered with a layer of silicone film, and the suction cup connector passes through the elastic plate, the hard phalanx, the silicone film and the suction cup Connection, the suction cup is connected to the air pump through a catheter, the fingers are connected to the base and the motor through a steel wire, and the steel wire is placed between the hard phalanx and the silicone membrane;
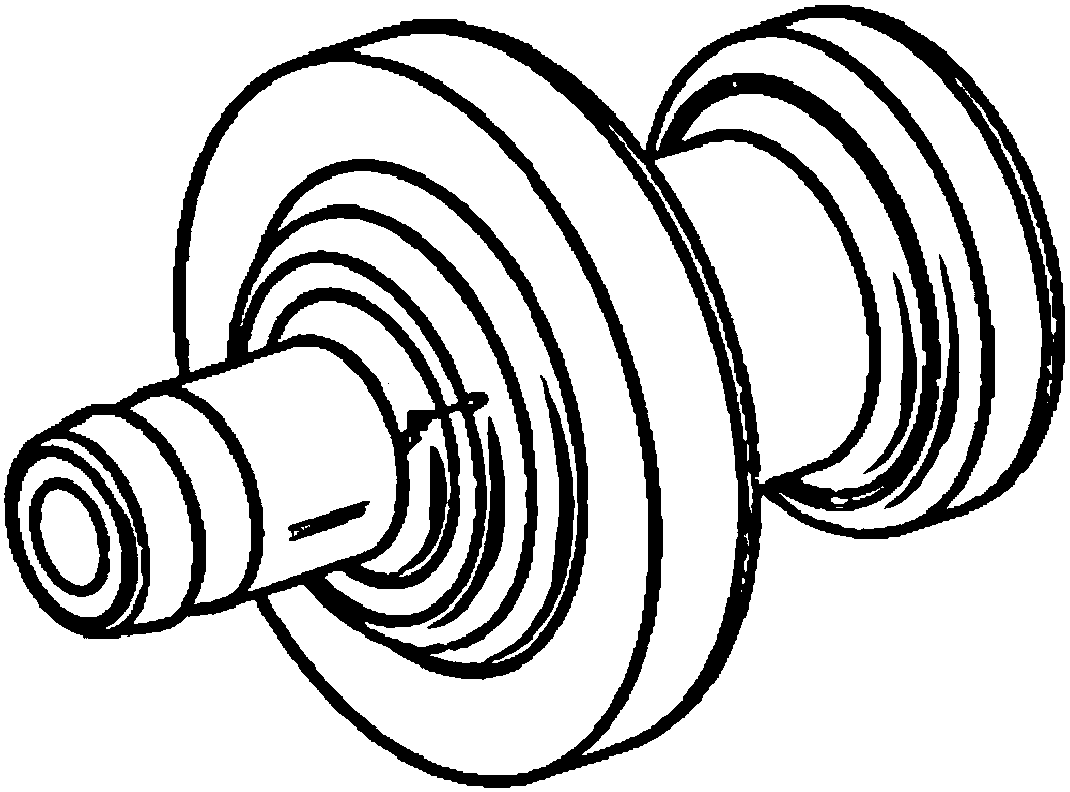
[0022] The base includes a base, the base is provided with a finger support, wire routing pulleys and rollers, the motor is fixed on the base, the rollers are fixed on the output shaft of the motor, and the steel wire is carried on the On the steel wire running pulley ...
specific Embodiment
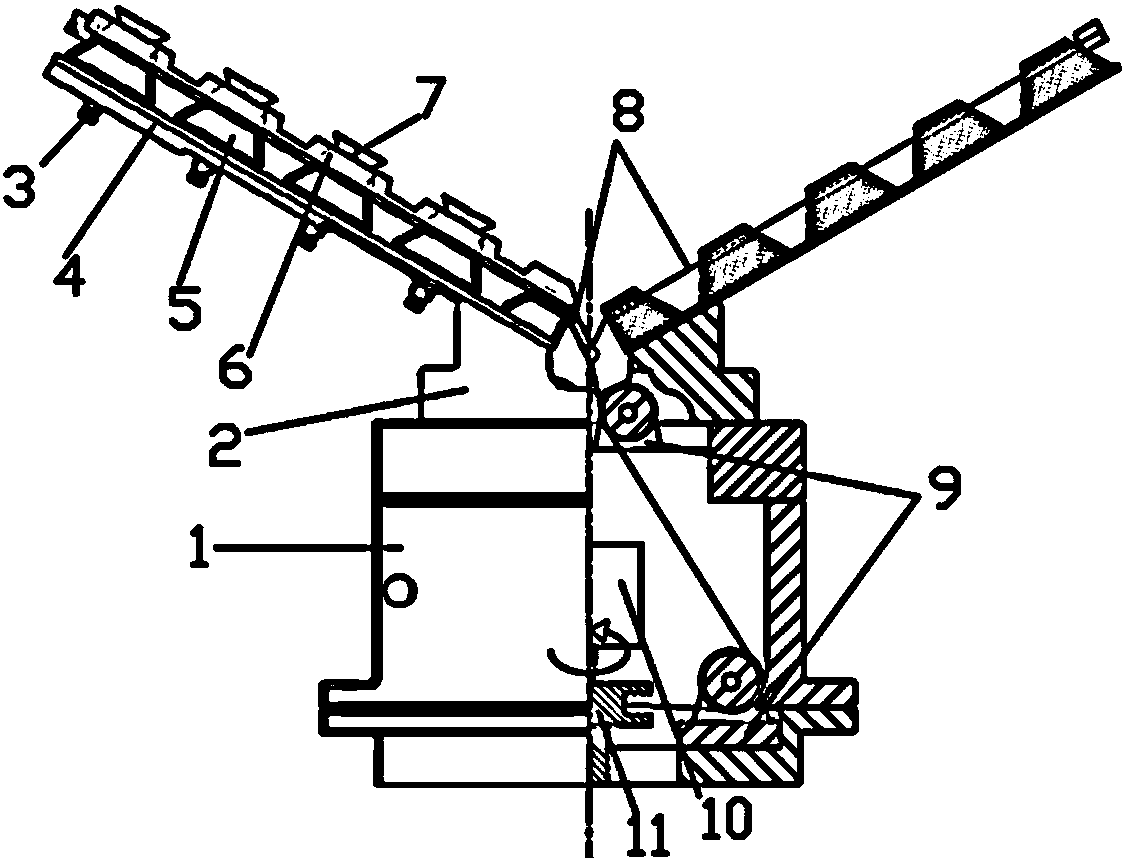
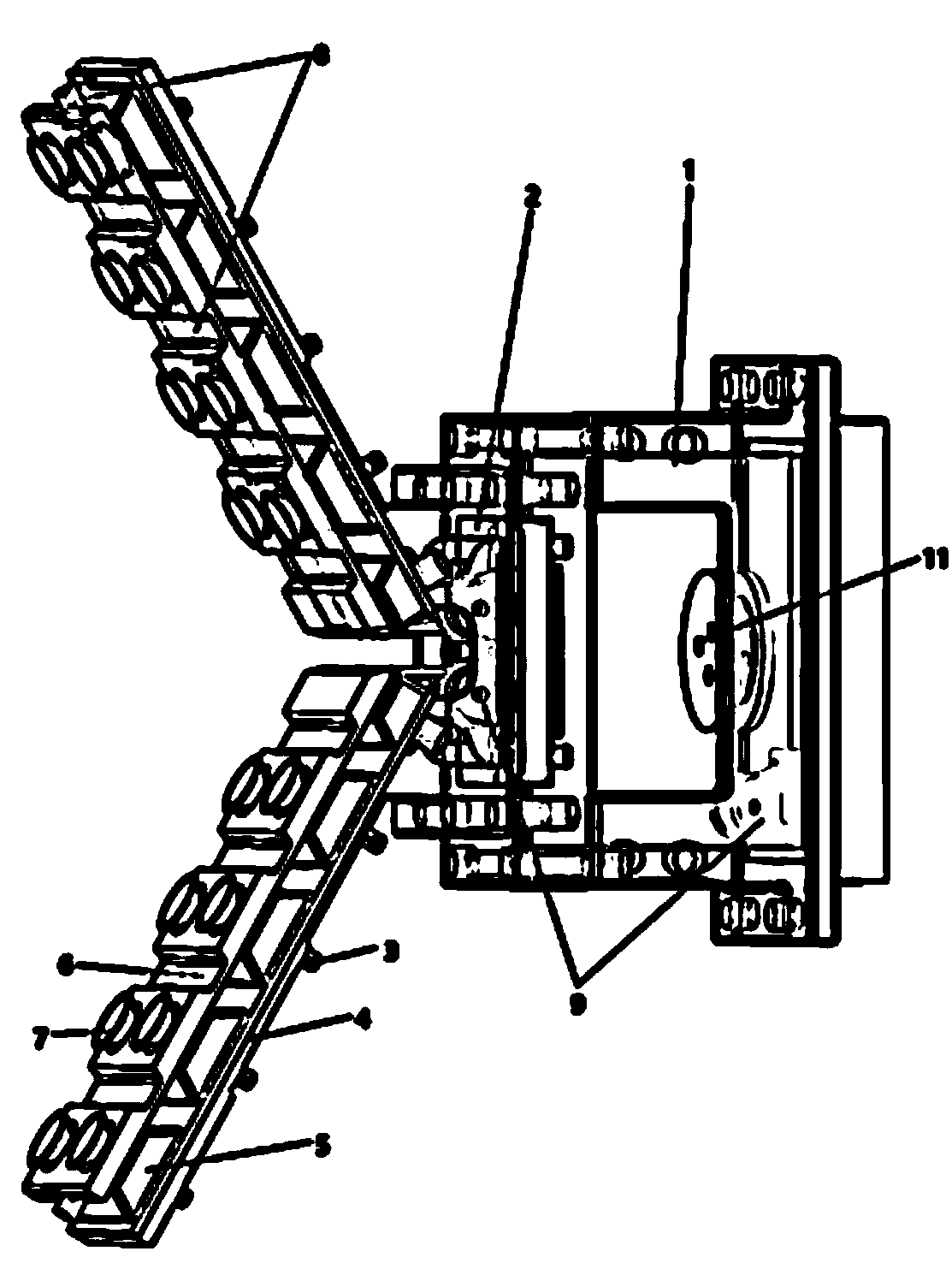
[0048] refer to figure 1 , figure 2 , image 3 , the present embodiment includes two fingers, a substrate, a motor 10 and an air pump; the fingers are connected to the finger support 2 of the substrate by bolts, the motor 10 is fixed on the substrate by a motor seat, and the air pump is connected to the suction cup 7 through a conduit.
[0049] The finger includes an elastic plate 4 of PVC material, a hard phalanx 5, a silicone film 6, a suction cup 7, a suction cup connector 3, a catheter, and a steel wire 8. The two fingers are symmetrical about the midline, and the principle is the same; 5 hard phalanxes 5; the hard phalanges 5 are covered with a layer of silicone film 6 made of 3D printing mold; the suction cup 7 connector passes through the elastic plate 4, the hard phalanx 5 and the silicone film 6, and is connected with the suction cup 7 The catheter connects the suction cup 7 to the air pump, and controls the suction force of the suction cup 7 through the opening an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More