

Crawler type passive self-adaptive robot
A crawler and robot technology, applied to tracked vehicles, motor vehicles, transportation and packaging, etc., can solve the problems of easy slipping, small contact area between wheeled robots and the ground, and complex control system, and achieve the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The technical solutions of the present invention will be further specifically described below in conjunction with the embodiments and the drawings, but this is not a limitation on the protection scope of the present application.
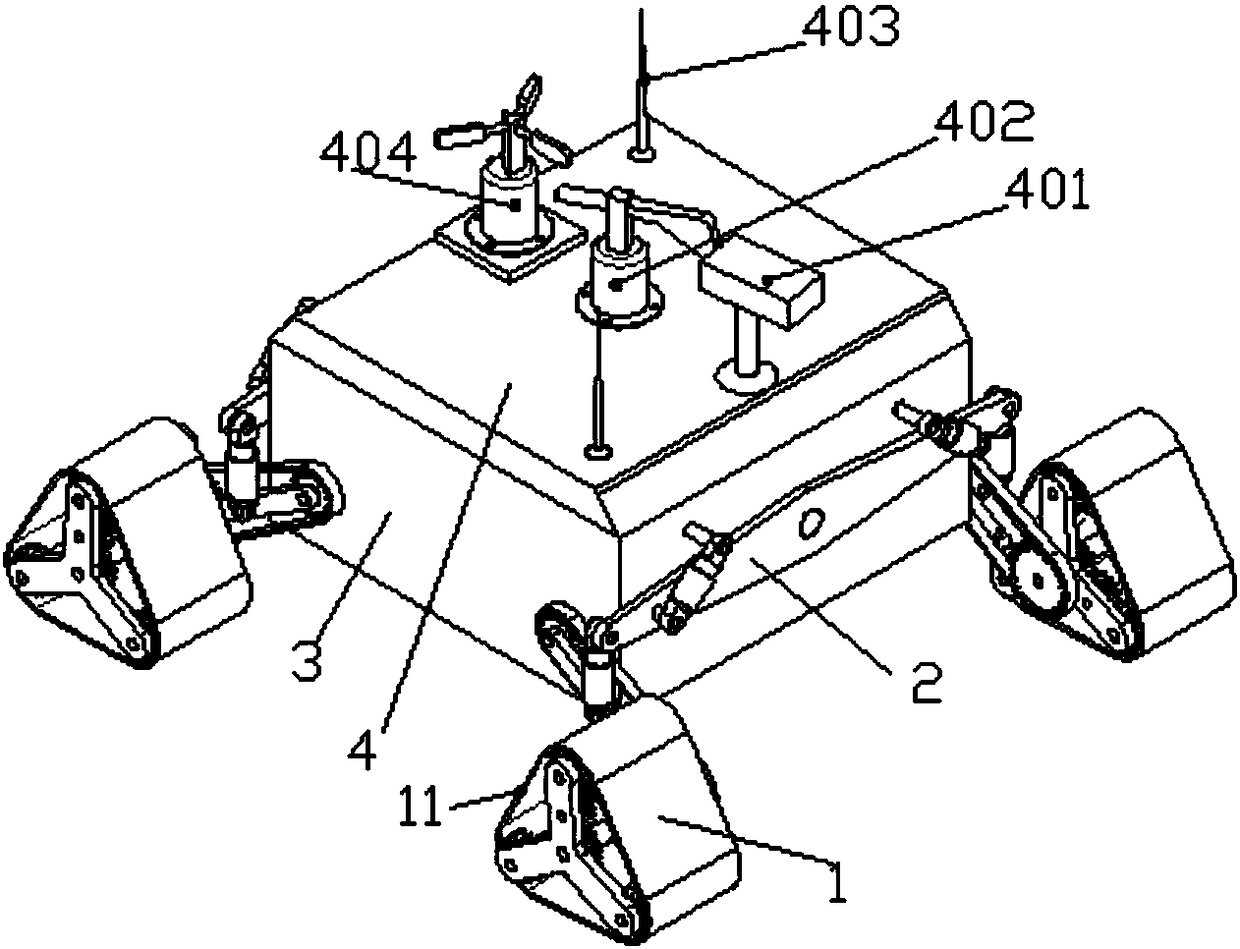
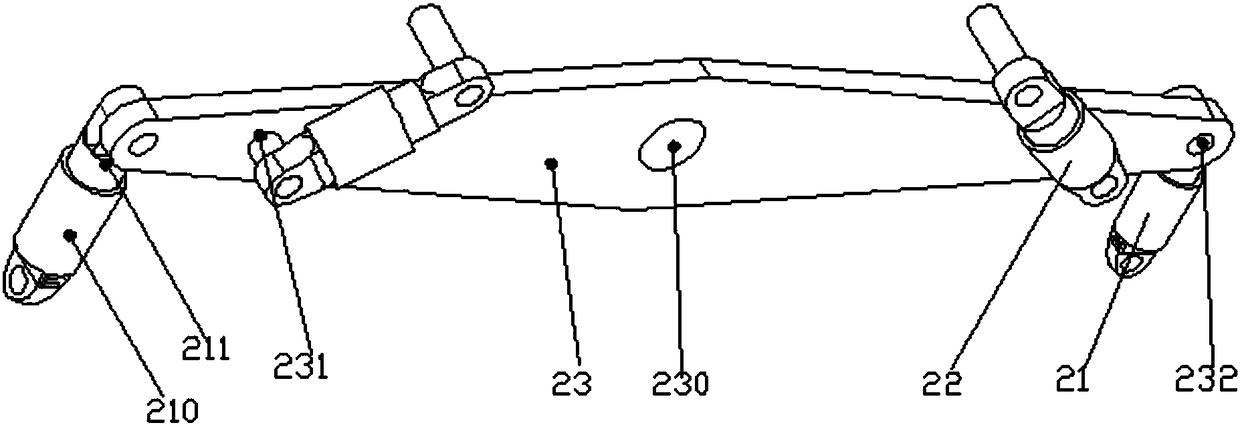
[0033] The crawler-type passive adaptive robot of the present invention (referred to as robot, see Figure 1-5 ) Including a car body module 3, two shock absorption modules installed on the front and rear of the car body module 2, an information collection module 4 installed on the upper part of the car body module, and four crawler wheels 1 installed on both sides of the car body module; The two ends of the shock module are connected to two crawler wheels; the four crawler wheels have the same structure and are arranged symmetrically around the car body module;
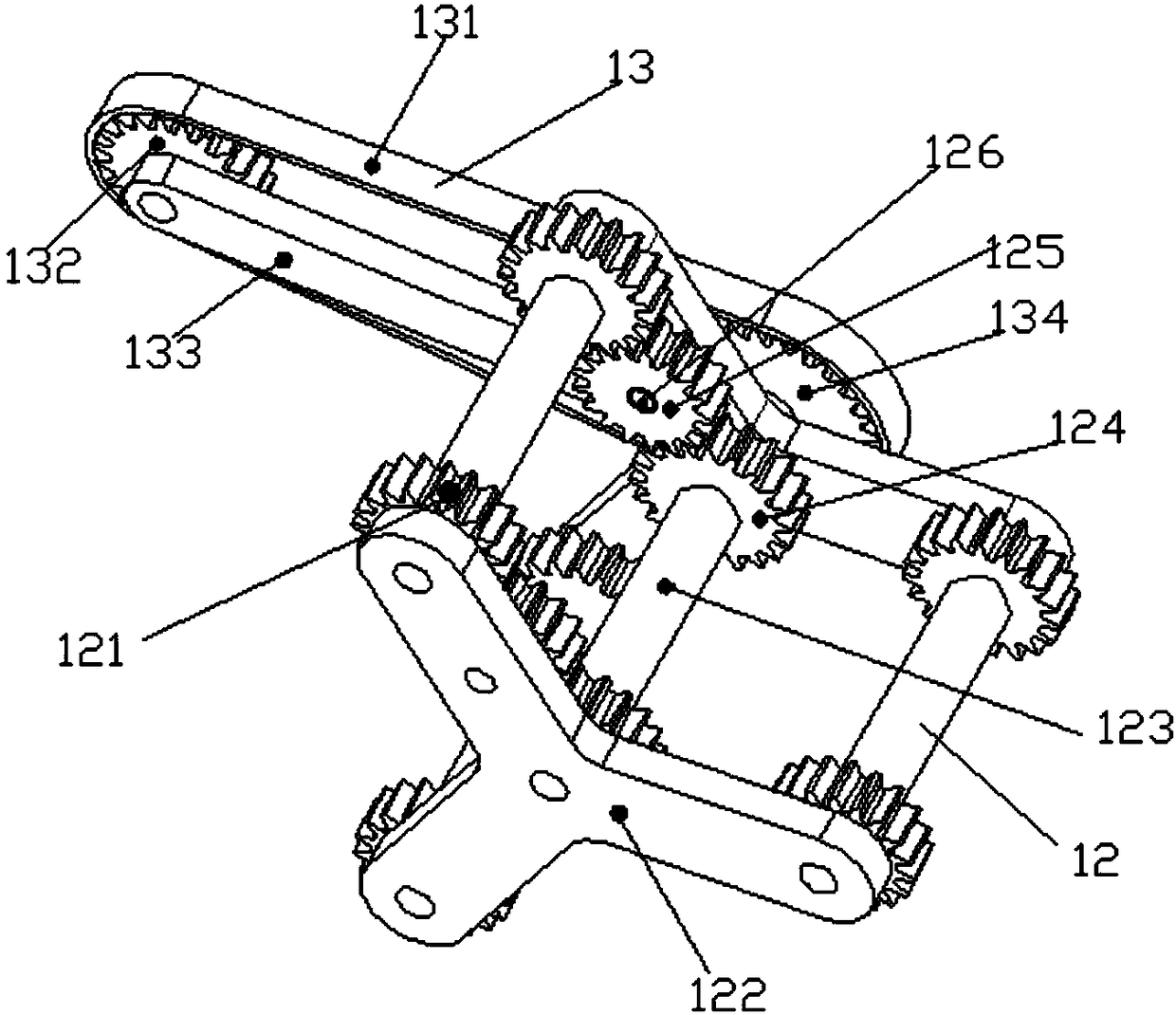
[0034] Each crawler wheel 1 includes a crawler belt 11, a pulley structure 12, and a belt transmission body 13. The belt transmission body 13 is connected to the vehicle body module on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More