

Multi-target collaborative tracking method for large scenes, intelligent monitoring system, traffic system
A technology for tracking systems and large scenes, applied in the fields of intelligent monitoring systems, traffic systems, and multi-target collaborative tracking methods for large scenes, which can solve difficult robust tracking, differences between predicted positions and actual target positions, and changes in movement speed and direction and other problems, to achieve the effect of improving detection accuracy, improving utilization rate, and improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0035] The present invention aims at the problem that less target information is obtained during the multi-target tracking process in a large scene, the features between targets are not obvious, and the tracking target is easy to be lost when the targets are staggered and occluded, and provides a multi-target collaborative tracking method in a large scene.
[0036] The application principle of the present invention will be described in detail below in conjunction with the accompanying drawings.
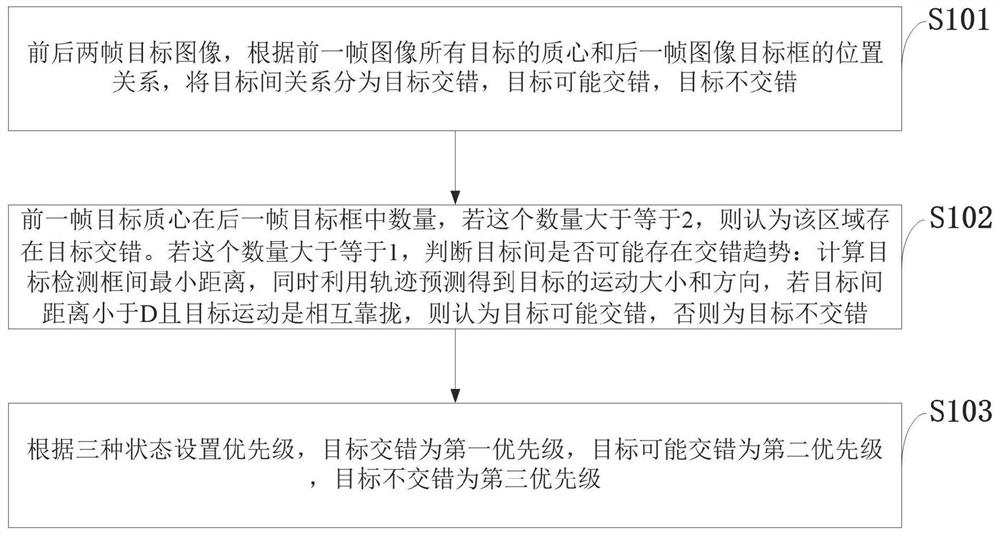
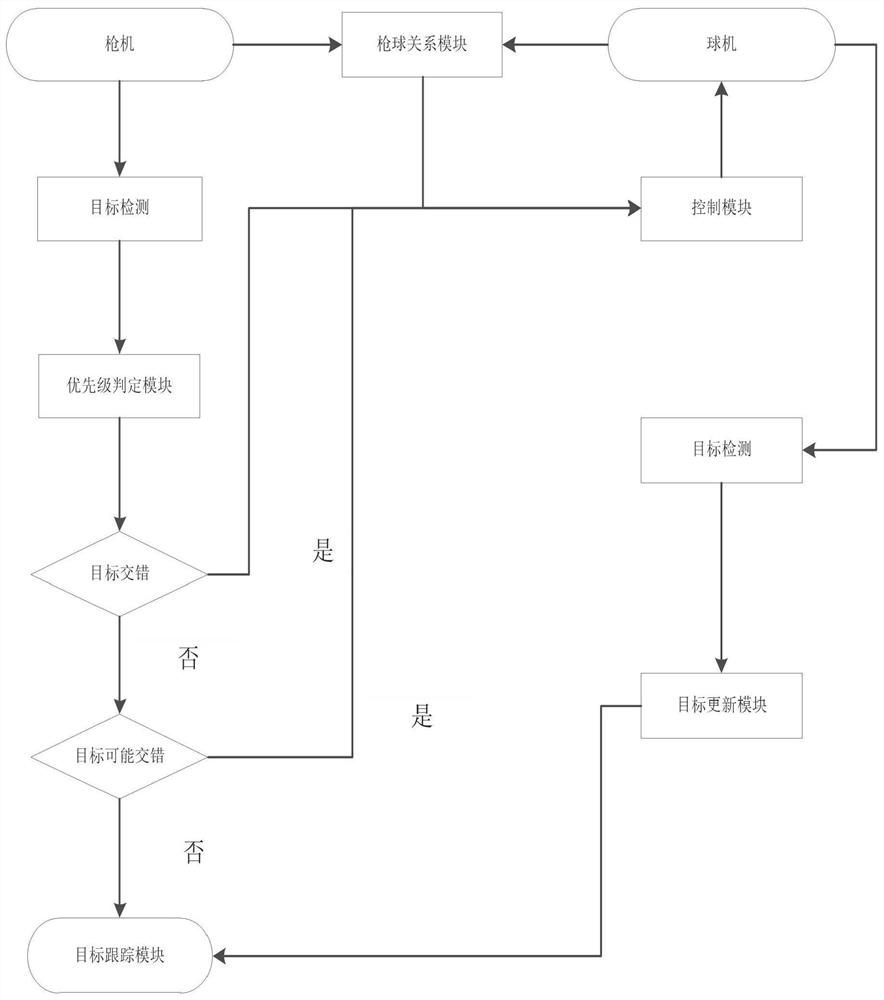
[0037] Such as figure 1 As shown, the large scene multi-target cooperative tracking method provided by the embodiment of the pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More