

Vibration control method of flexible mechanical arm based on cooperative tracking
A technology of flexible manipulators and boundary controllers, applied in manipulators, program control, general control systems, etc., can solve problems such as few reports
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
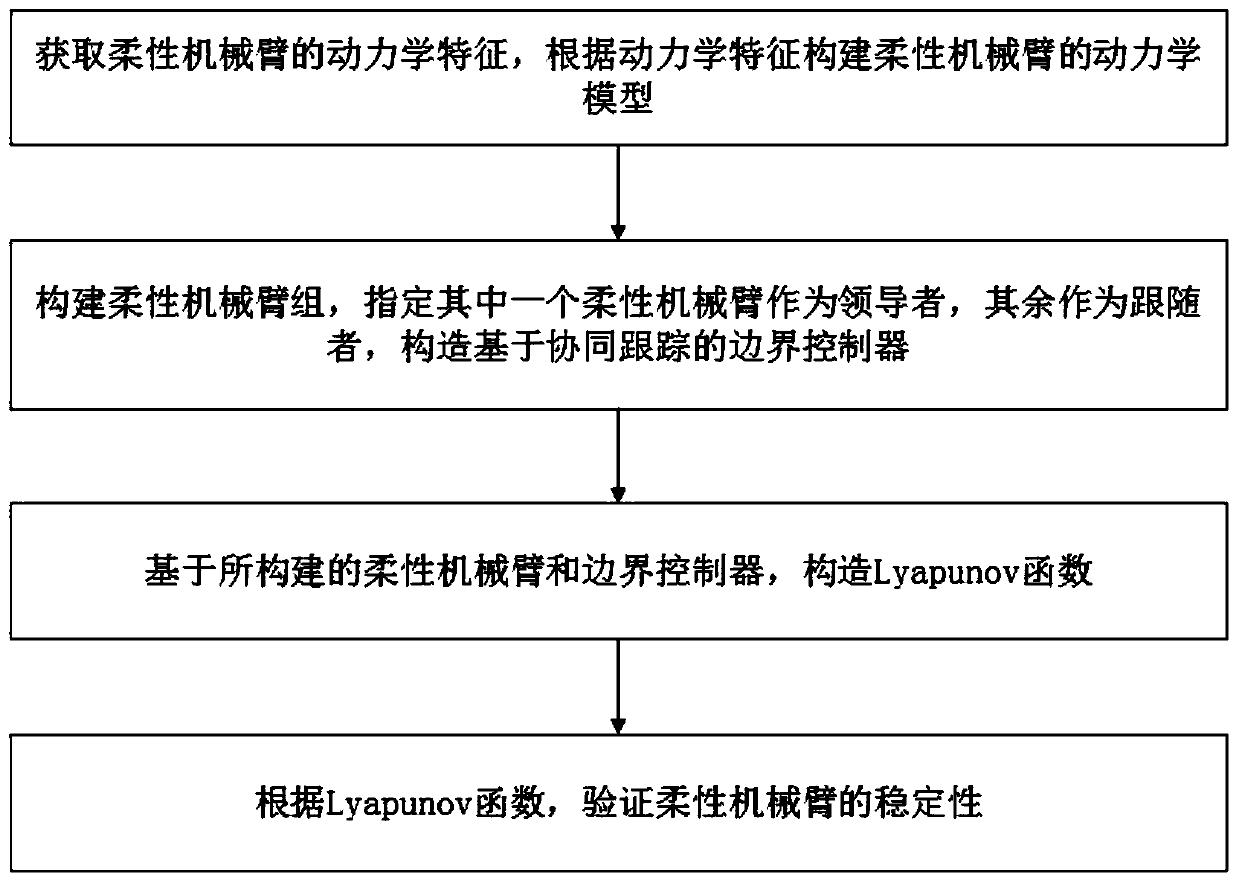
[0055] refer to figure 1 , figure 1 It is a flowchart diagram of a vibration control method based on a cooperative tracking flexible robotic arm disclosed in an embodiment of the present invention, including the following steps:
[0056] S101. Construct a dynamic model of the flexible manipulator according to the dynamic characteristics of the flexible manipulator.
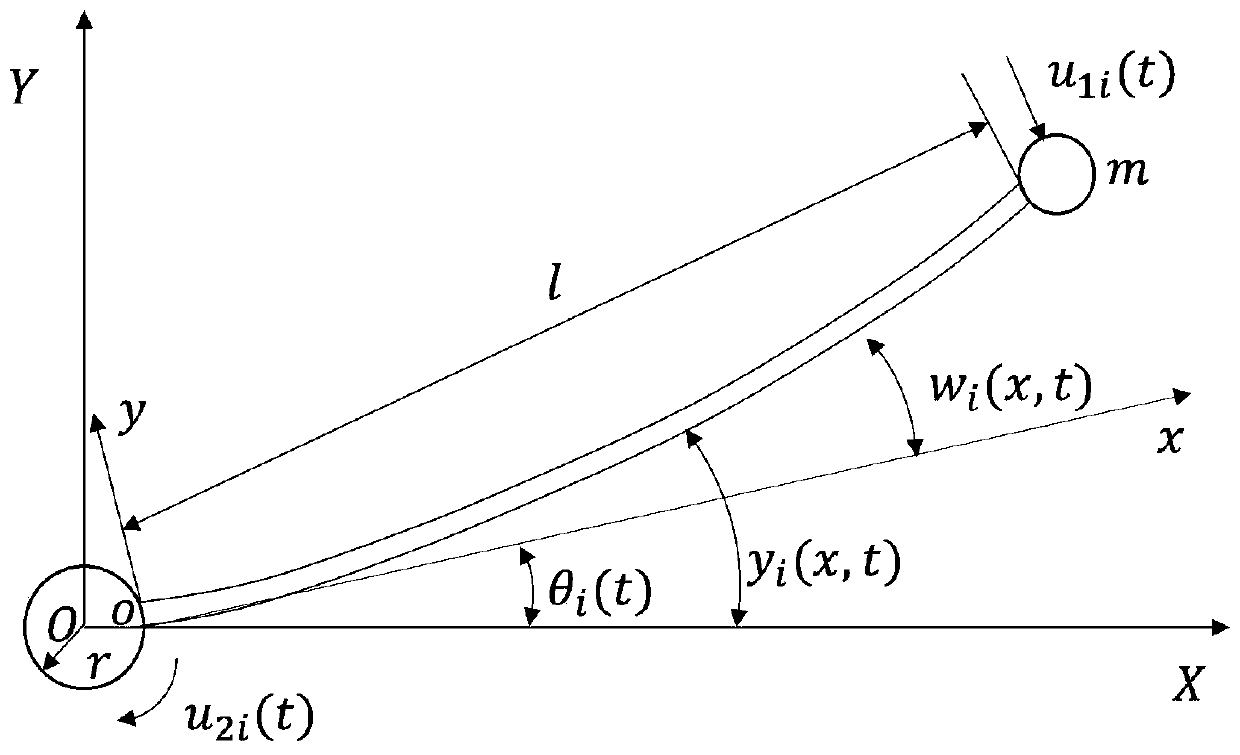
[0057] as attached figure 2 As shown in , a typical flexible manipulator, the left boundary of the flexible manipulator is fixed at the coordinate origin, referred to as the fixed end, and the right boundary can carry a load, referred to as the tip, and the boundary controller u 1i and u 2i Act on the tip and left side of the flexible manipulator respectively. The length of the flexible manipulator is l, and its vibration offset in the xoy coordinate system is w i (x,t), the vibration offset in the XOY coordinate system is y i (x,t).
[0058] The kinetic energy of the flexible manipulator is
[0059]
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More