

A Vibration Control Method of Flexible Manipulator Based on Cooperative Tracking
A flexible manipulator, boundary controller technology, applied in manipulators, program control, general control systems, etc., can solve problems such as few reports, and achieve the effect of suppressing vibration, improving control accuracy, collaborative tracking effect, and improving control quality.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
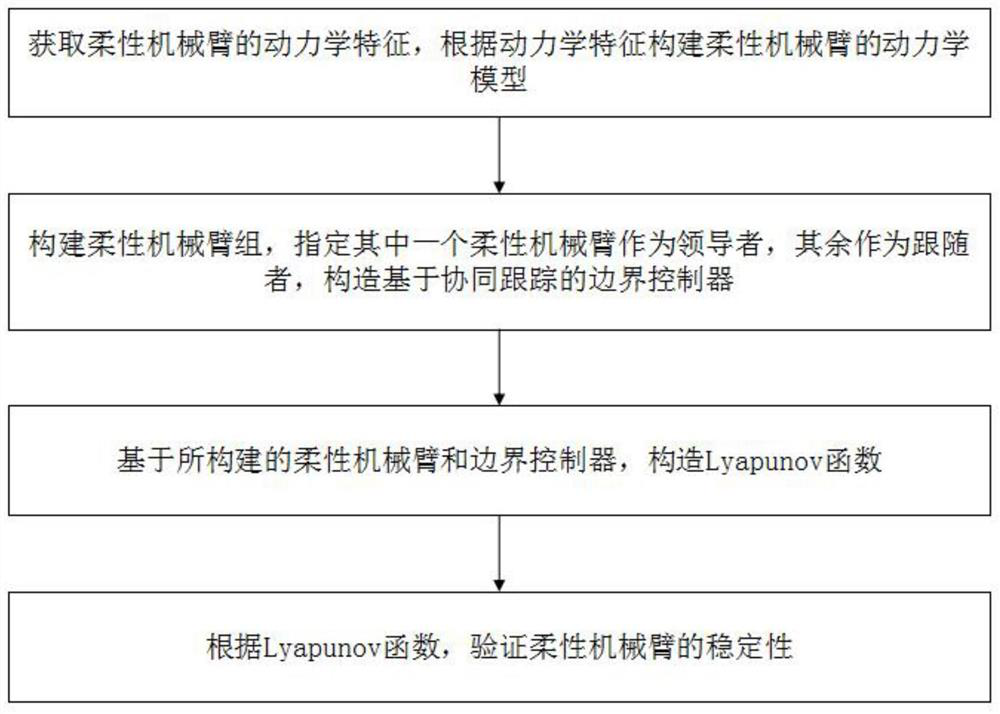
[0055] refer to figure 1 , figure 1 It is a flowchart diagram of a vibration control method based on a cooperative tracking flexible robotic arm disclosed in an embodiment of the present invention, including the following steps:
[0056] S101. Construct a dynamic model of the flexible manipulator according to the dynamic characteristics of the flexible manipulator.
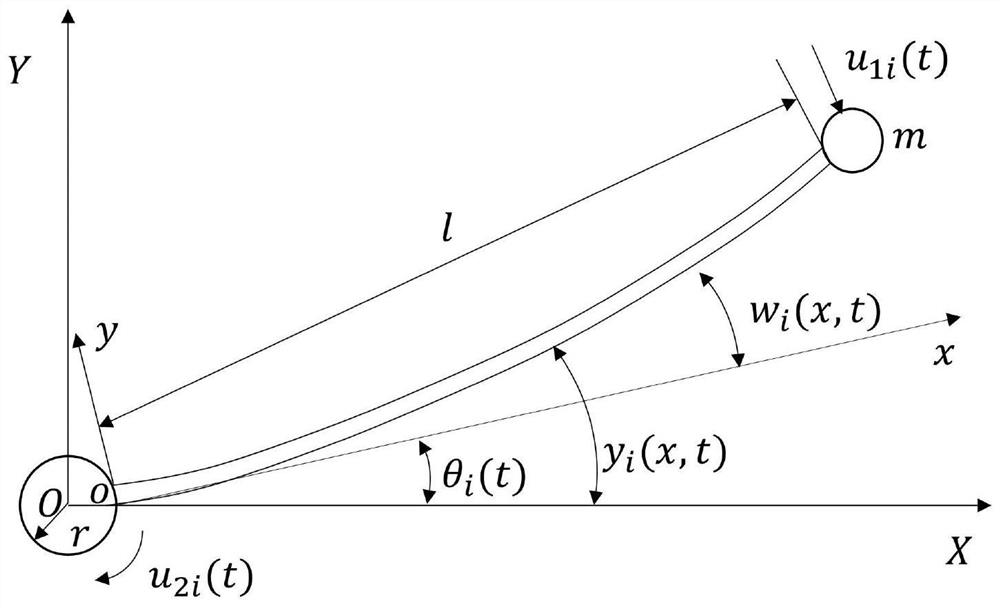
[0057] as attached figure 2 As shown in , a typical flexible manipulator, the left boundary of the flexible manipulator is fixed at the coordinate origin, referred to as the fixed end, and the right boundary can carry a load, referred to as the tip, and the boundary controller u 1i and u 2i Act on the tip and left side of the flexible manipulator respectively. The length of the flexible manipulator is l, and its vibration offset in the xoy coordinate system is w i (x,t), the vibration offset in the XOY coordinate system is y i (x,t).
[0058] The kinetic energy of the flexible manipulator is
[0059]
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More