

Home cleaning robot control system based on adaptive strategy optimization
A cleaning robot and control system technology, applied in the field of artificial intelligence and control, can solve the problems of prolonged cleaning, decreased cleanliness, and inability to self-learn, so as to improve cleaning operations, reduce repetitive operations, and improve self-learning ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
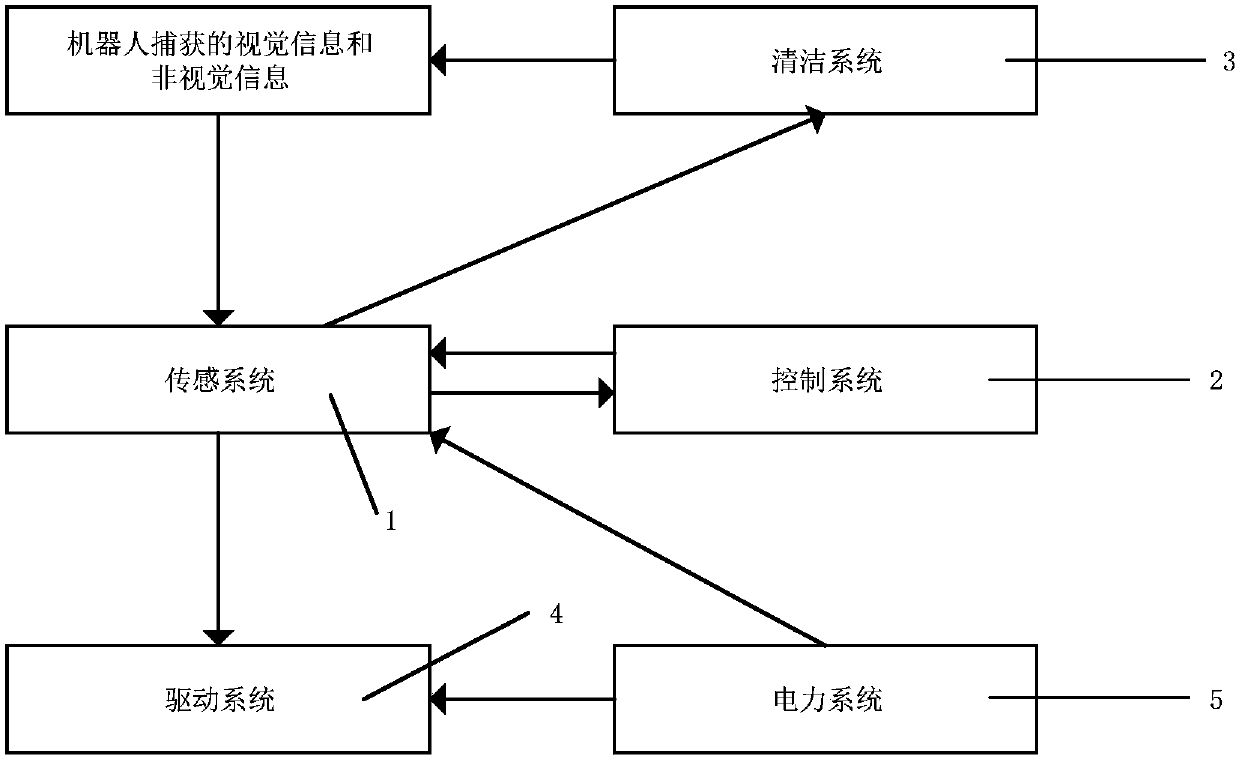
[0035] Example: see attached Figure 1-6 As shown, a household cleaning robot control system based on adaptive strategy optimization includes a sensor system 1, a control system 2, a cleaning system 3, a drive system 4 and a power system 5, and the sensor system 1 collects environmental information and power System 5 information, and the environmental information and power system 5 information are transmitted to the control system 2, the control system 2 processes the received information through an adaptive strategy control method, and transmits the control signal to the drive system 4 and the cleaning system 3. Wherein: the main function of the sensing system 1 is to collect environmental information and control signals of the transmission control system 2, the sensing system 1 perceives the current environment where the robot is in by collecting environmental information, and transmits the control signals of the control system 2 to Control the robot to move, clean or reple...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More