

Indoor transformer station inspection unmanned plane positioning method
An indoor positioning and positioning method technology, which is applied in satellite radio beacon positioning systems, positioning, radio wave measurement systems, etc., can solve problems such as inability to realize self-positioning, failure to receive outdoor GPS signals, and inability to complete inspection work, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
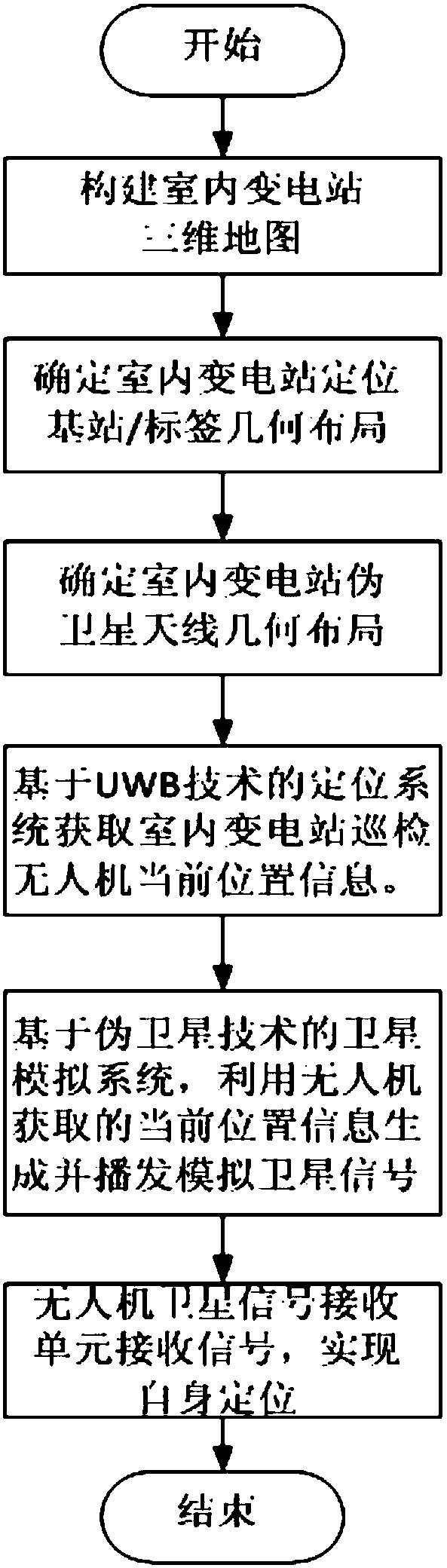
[0041] like figure 1 As shown, an indoor substation inspection UAV positioning method includes the following steps:
[0042] 1) Select an indoor substation, use the satellite navigation receiver to construct the real three-dimensional coordinate system of the indoor substation, and provide the map required for UAV flight.
[0043] Described step 1) specifically comprises the following steps:
[0044] 1-1) Select a certain indoor substation, place the satellite navigation receiver at a point on the ground outside the indoor substation, and the satellite navigation receiver receives the position signal calculated by the outdoor real satellite to obtain the position of the point on the ground outside the indoor substation;
[0045] 1-2) Coordinate conversion: In addition, due to the navigation message received by the satellite navigation receiver, the posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More