

Hand shape, pose, position and motion feature-based gesture control method and system
A morphological feature and gesture control technology, applied in the field of gesture recognition, can solve the problem that the gesture control method cannot be selected and controlled by a variety of functional modules, and achieve the effect of wide application and convenient use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
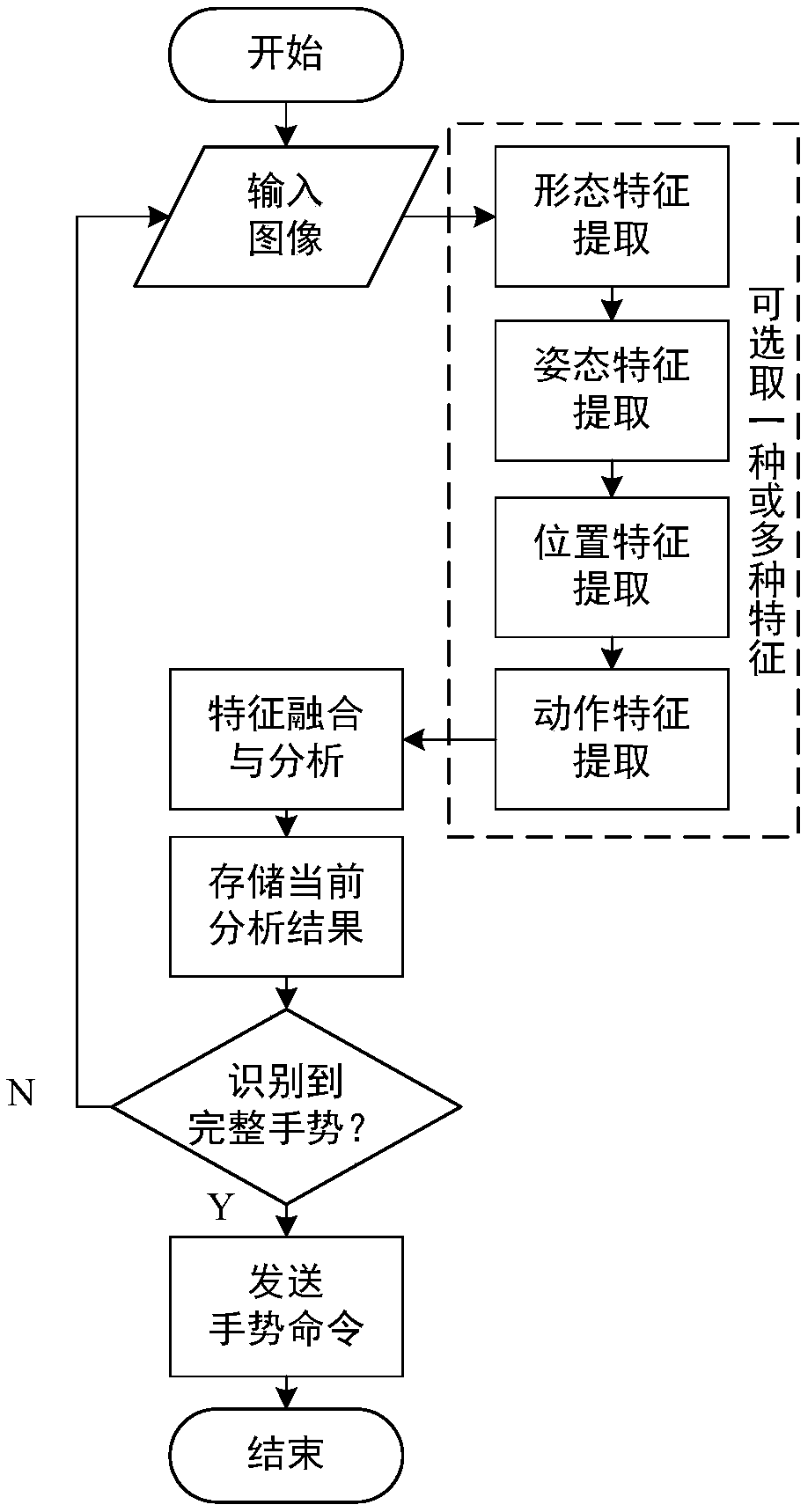
[0100] The present invention proposes a gesture control method based on hand shape, posture, position and motion characteristics, which captures and extracts hand shape, posture, position and motion characteristics in real time through a camera, recognizes user gesture commands, and realizes multiple groups of equipment and Control of multiple functional modules in the device. The gesture control method is as figure 1 As shown, the input image is first read, and one or more of the hand shape, posture, position, and action features can be sequentially extracted from the image based on the actual application needs, and the features are fused and analyzed. When the complete gesture command is detected , send this command, otherwise store the current analysis result and combine it with subsequent images for processing and analysis, specifically:
[0101] Step 1. Read the image data of the input image;
[0102] Step 2, extracting hand features in the image data described in step ...
Embodiment 2
[0182] The present invention proposes a gesture control method based on hand shape, posture, position and motion characteristics, which captures and extracts hand shape, posture, position and motion characteristics in real time through a camera, recognizes user gesture commands, and realizes multiple groups of equipment and Control of multiple functional modules in the device. The gesture control method is as figure 1 As shown, the input image is first read, and one or more of the hand shape, posture, position, and action features can be sequentially extracted from the image based on the actual application needs, and the features are fused and analyzed. When the complete gesture command is detected , send this command, otherwise store the current analysis result and combine it with subsequent images for processing and analysis, specifically:
[0183] Step 1. Read the image data of the input image;
[0184] Step 2, extracting hand features in the image data described in step ...
Embodiment 3
[0198] This embodiment proposes a gesture control system implementing the gesture control method described in claim 1, such as Figure 12 As shown, the technical solutions adopted are as follows:
[0199] The control system includes a main controller, a data acquisition module, a data processing module, an instruction output module and an operation feedback module; the data acquisition signal control interaction end of the main controller is connected to the data control interaction end of the data acquisition module; The data processing signal control interaction end of the main controller is connected to the data control interaction end of the data processing module; the instruction output signal control interaction end of the main controller is connected to the data control interaction end of the instruction output module; The operation feedback signal control interaction end of the main controller is connected to the data control interaction end of the operation feedback m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More