

Robot capable of imitating cat jump
A robot and DC motor technology, applied in the field of bionic robots, can solve the problems of insufficient jumping ability, energy waste and impact of bionic quadruped robots, and achieve the effect of improving high jump and long jump performance and improving utilization efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
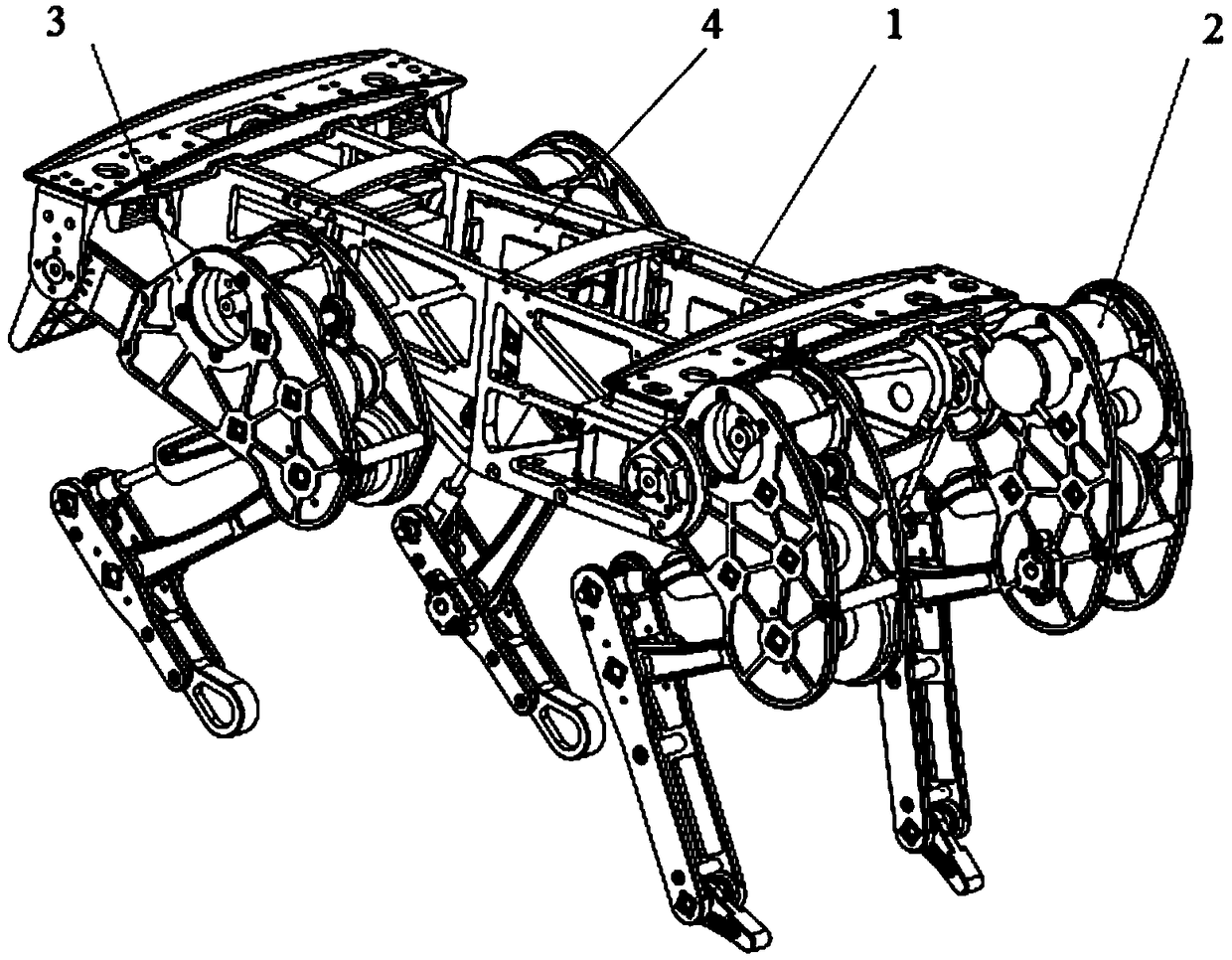
[0024] Example 1, see attached figure 1 , a cat-like jumping robot, which includes: a trunk mechanism 1, a front leg jumping mechanism 2, a rear leg jumping mechanism 3, and a detection control mechanism 4;
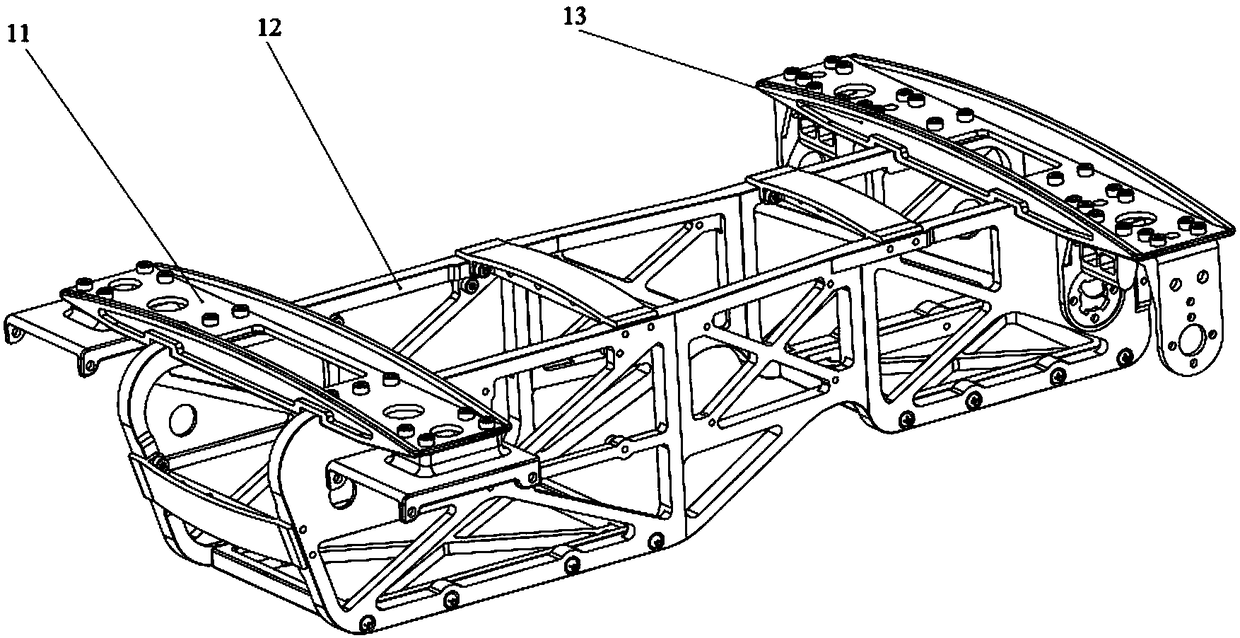
[0025] see attached figure 2 The torso mechanism 1 includes: a torso body 12, and a front beam frame 11 and a rear beam frame 13 respectively arranged in front and back of the torso body 12; specifically, the torso body 12 is assembled from three hollow aluminum parts; the inside of the torso body 12 is Divided into thoracic cavity and abdominal cavity;
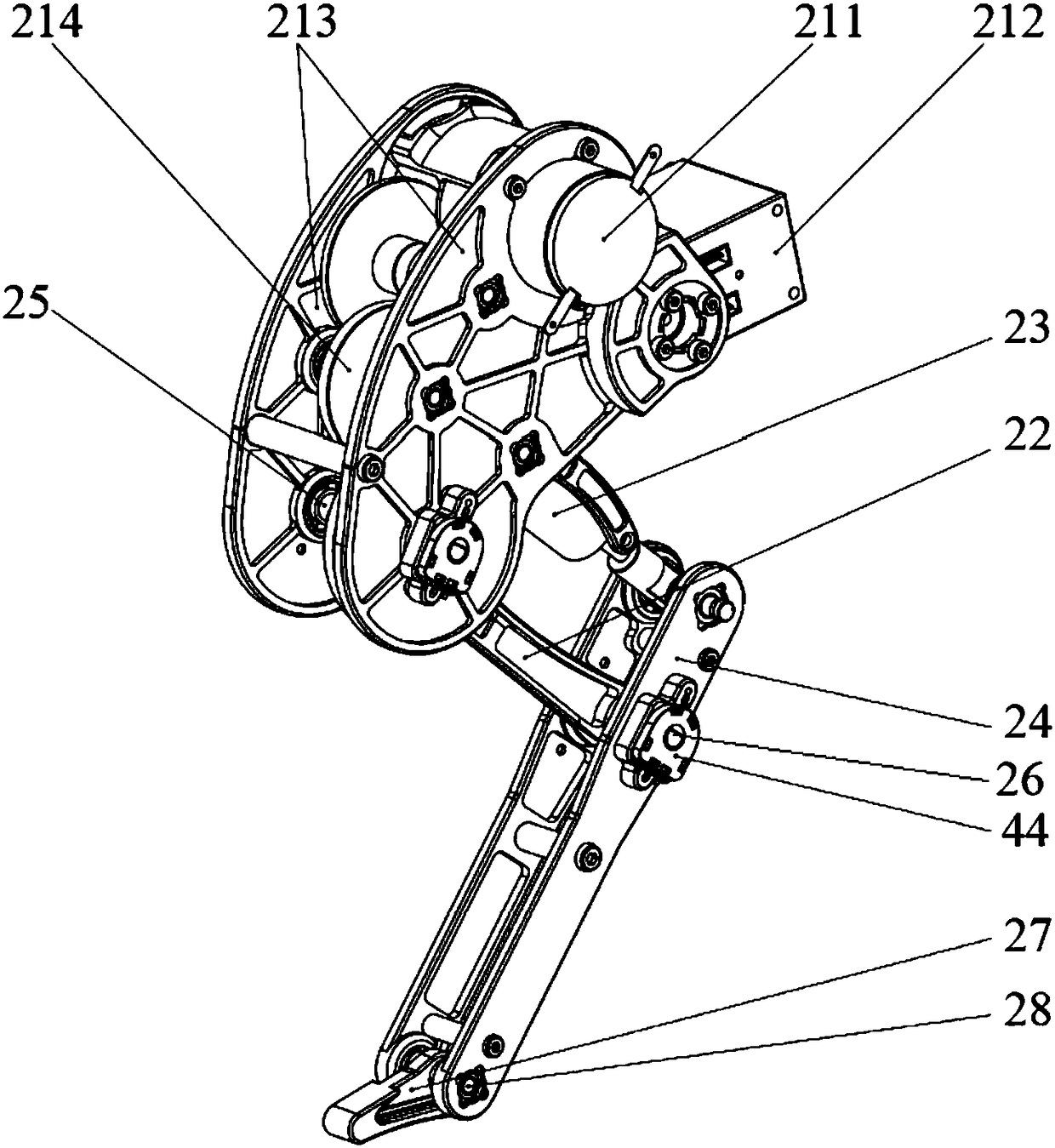
[0026] see attached image 3 , the front leg jumping mechanism 2 has two groups in total, which are respectively arranged on the left and right sides of the front part of the trunk body 12, including: the shoulder blade made up of the front leg servo motor 212, the front leg DC motor 211, the shoulder blade splint 213, and the front leg gear set 214 , front leg big arm 22, front leg forearm 24, front leg spring 23 an...
Embodiment 2
[0030] Embodiment 2, see attached Image 6 On the basis of Embodiment 1, further, the wrist joint shaft 28 is sleeved with a torsion spring 29, and the torsion spring 29 is used to limit the rotation angle of the forefoot 27 relative to the forearm 24 of the front leg; the free angle of the torsion spring 29 is greater than The angle of the torsion spring when the robot is standing normally, the torsion spring 29 remains in a compressed state all the time when the robot is standing, which can play a good buffering role when the front foot 27 lands, and accumulate power for the next take-off.
Embodiment 3
[0031] Embodiment 3, on the basis of Embodiment 1 or 2, an elastic stopper is added at the shell of the rear leg DC motor 312;
[0032] When the rear leg DC motor 312 drives the rear leg big arm 37 to be in a tightened state, the rear leg forearm 32 is in contact with the rear leg servo motor 311 shell, and an elastic stop is provided at the contact, and the elastic stop is squeezed. Energy can be stored and released when the squeeze is gone. When the rear leg big arm 37 is in the tightened state, the rear leg forearm 32 is limited by the elastic stopper to compress the stopper, which can be used for energy storage and boosting when jumping at the maximum distance.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More